 RChadwick7
commented
1 year ago
RChadwick7
commented
1 year ago That looks promising! They make smaller relays, but the mechanical output will be weaker. You might get a stronger output by finding a low voltage relay, say 3V (I don't know if these exist, I've only seen 5V), then drive them at a higher voltage. If you're driving them directly and not using the contacts, you can try a mechanical buzzer, which is essentially a relay wired to oscillate, connected to a large diaphragm. Those might have even more powerful coils, I'm excited to hear how these work.
 phil-barrett
phil-barrett HackyDev
HackyDev
Hey!
I'm here to report some findings on the use of electromagnets. I was able to achieve 250Hz frequency and a rise time of 10 - 20ms using an electromagnet from a simple arduino relay and a neodimium magnet. I measured the frequency by pressing the contactor against the microphone and using this service to detect the pitch. The vibrations are very mild, but noticeable. The exact amplitude is not known, because I have no idea how to measure it yet. I'm sure the rise time can be improved using other electromagnets/code/etc.
Here's the representation of the concept.
Here's a relay.
Here's a relay without latching mechanism and the casing.
Here's new casing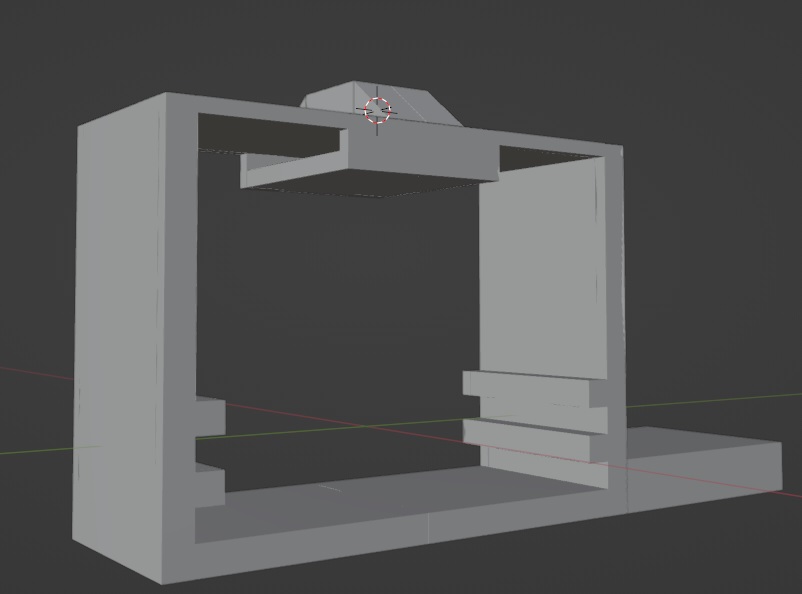
Here's its all together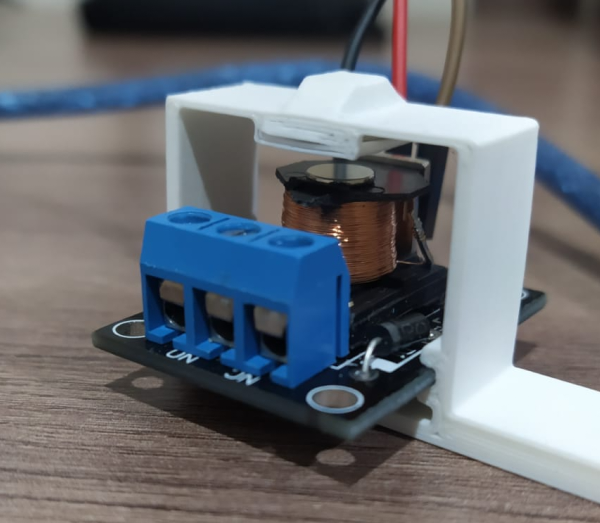
Here's Arduino code:
Here's the rise time (screenshot from audio editor)