 kijongGil
commented
5 years ago
kijongGil
commented
5 years ago Hi @timdori :) If you want to SLAM using Mecanum turtlebot3 with rplidar, you have to solve some problem. First, bringup your turtlebot3. we have release turtlebot3_bringup package. but It is based on LDS and origin turtlebot3. So, you have to modify this code for rplidar. Second, you need odom data to do SLAM. But, calculating odom of origin and Mecanum is different. So you have to make a new calculating odom. refer to this code https://github.com/ROBOTIS-GIT/OpenCR/blob/master/arduino/opencr_arduino/opencr/libraries/turtlebot3/examples/turtlebot3_burger/turtlebot3_core/turtlebot3_core.ino
Thanks, Gilbert
 timdori
timdori

 robotpilot
robotpilot harshitkumawat444
harshitkumawat444 Dhaour9x
Dhaour9x

Hey Guys, i hope you can help me. I have an OpenCr Board and kind of a Mecanum turtlebot3 with an Lidar sensor. I am trying to map my office but its not working. I will try to give u as information as possible.
my ros commands are: roscore roslaunch rplidar_ros view_rplidar.launch export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
with rostopic list i get: /clicked_point /initialpose /joint_states /map /map_metadata /map_updates /move_base_simple/goal /rosout /rosout_agg /scan /tf /tf_static /turtlebot3_slam_gmapping/entropy
rostopic echo /map gets no data
in the gmapping command window the following warning pups up: [ WARN] [1536589138.659010571]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
when i take fixed_frame laser: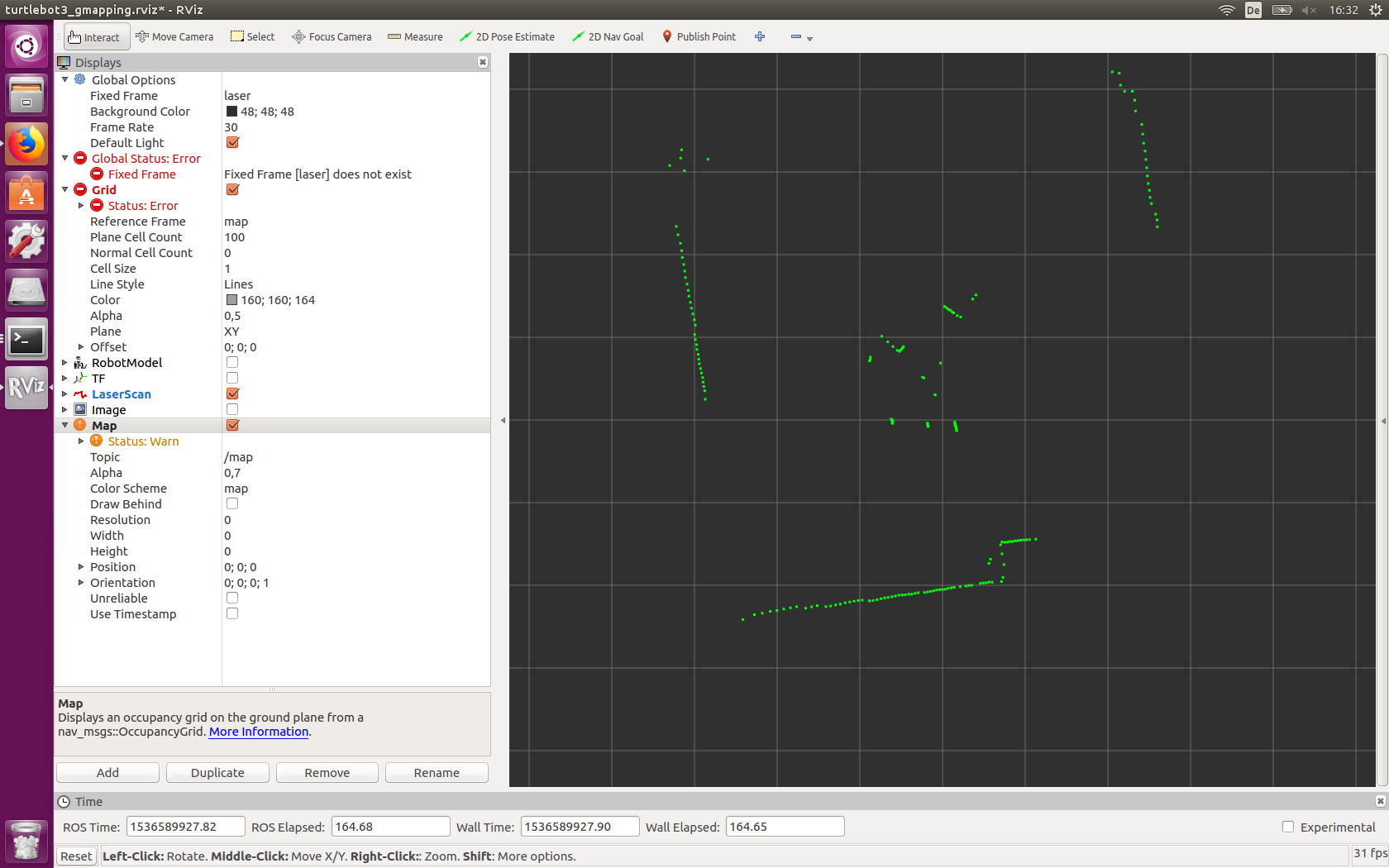
when i take fixed_frame odom:
I hope anyone can help me. Thank you.