 ROBOTIS-Will
commented
3 years ago
ROBOTIS-Will
commented
3 years ago Hi @Paulino1956 Please make sure that you have sourced the ros packages from Raspberry Pi as below.
$ source ~/catkin_ws/devel/setup.bashOpen Paulino1956 opened 3 years ago
ROBOTIS-Will
commented
3 years ago Hi @Paulino1956 Please make sure that you have sourced the ros packages from Raspberry Pi as below.
$ source ~/catkin_ws/devel/setup.bash Paulino1956
commented
3 years ago
Paulino1956
commented
3 years ago Hi Will!
Thank for your support ! I have used the code as you indicated (See below), but unfortunately obtained the same type of result:
pi@raspberrypi:~ $ source ~/catkin_ws/devel/setup.bash pi@raspberrypi:~ $ roslaunch turtlebot3_bringup turtlebot3_robot.launch ... logging to /home/pi/.ros/log/4c2beafa-6fcd-11eb-97fc-d8c0a6261e0f/roslaunch-raspberrypi-26579.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.0.0.27:35567/
PARAMETERS
NODES / turtlebot3_core (rosserial_python/serial_node.py) turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics) turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://10.0.0.115:11311
ERROR: cannot launch node of type [rosserial_python/serial_node.py]: rosserial_python ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/home/pi/catkin_ws/src ROS path [2]=/opt/ros/melodic/share ERROR: cannot launch node of type [hls_lfcd_lds_driver/hlds_laser_publisher]: hls_lfcd_lds_driver ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/home/pi/catkin_ws/src ROS path [2]=/opt/ros/melodic/share ERROR: cannot launch node of type [turtlebot3_bringup/turtlebot3_diagnostics]: Cannot locate node of type [turtlebot3_diagnostics] in package [turtlebot3_bringup]. Make sure file exists in package path and permission is set to executable (chmod +x) No processes to monitor shutting down processing monitor... ... shutting down processing monitor complete pi@raspberrypi:~ $
pi@raspberrypi:~ $ ls Bookshelf Downloads ros_catkin_ws build_isolated install_ros_melodic_rp3.sh src catkin_ws melodic-ros_comm-wet.rosinstall Templates Desktop Music Videos devel_isolated Pictures Documents Public pi@raspberrypi:~ $
on the NVIDIA side :
paulino@paulino-desktop:~$ roscore ... logging to /home/paulino/.ros/log/60e8942e-6fce-11eb-b82c-d8c0a6261e0f/roslaunch-paulino-desktop-13906.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.0.0.115:35523/ ros_comm version 1.14.10
PARAMETERS
NODES
auto-starting new master process[master]: started with pid [13916] ROS_MASTER_URI=http://10.0.0.115:11311/
setting /run_id to 60e8942e-6fce-11eb-b82c-d8c0a6261e0f process[rosout-1]: started with pid [13928] started core service [/rosout] ^C[rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete done paulino@paulino-desktop:~$ ls catkin_ws Downloads install_ros_melodic.sh.1 Port Templates Desktop examples.desktop Music Public Videos Documents install_ros_melodic.sh Pictures ROS paulino@paulino-desktop:~$
Thanks again in advance for you support !
ROBOTIS-Will
commented
3 years ago Hmm... Looks like you have followed a different installation than the eManual. If you don't need a GUI environment on Raspberry Pi, I'd recommend to Install with Ubuntu 18.04.3 preinstalled server ARM64 for Raspberry PI3 Please select the ROS version at the top of the page before following the instructions. https://emanual.robotis.com/docs/en/platform/turtlebot3/sbc_setup/
Paulino1956
commented
3 years ago Hello!
Thanks for the recommendation, it worked ! However, after successfully running the “bringup” procedure and operate via RC-100, I got into new issues : lost wireless connection with Pi (no wlan0 and IP address).
After several unsuccessful tentatives, I have also tried using another RBPi OS, and was able to get the wireless connection working via Pi (including wlan0 and IP address).
Thanks for your help!
Paulino
Paulino1956
commented
3 years ago Hello - I still cannot connect Pi3 to Wi-Fi. I have configured the network, as per the e-manual.
Thanks in advance for your support.
Paulino
Sent from my iPad
On Mar 3, 2021, at 6:03 PM, Paulino Rego Barros Jr. pregobarros@gmail.com wrote:
Hello again !
maybe I was not clear on my e-mail to you (see below), and my question is still how can I operate with the OS that you recommend? How can I fix it?
Thanks for your help!
Paulino
On Mar 2, 2021, at 12:50 PM, Paulino Rego Barros pregobarros@gmail.com wrote:
Hello!
Thanks for the recommendation, it worked ! However, after successfully running the “bringup” procedure and operate via RC-100, I got into new issues : lost wireless connection with Pi (no wlan0 and IP address).
After several unsuccessful tentatives, I have also tried using another RBPi OS, and was able to get the wireless connection working via Pi (including wlan0 and IP address). Thanks for your help! Paulino
ROBOTIS-Will
commented
3 years ago @Paulino1956 Hi, operating TurtleBot3 with RC-100 remote controller doesn't reuquire ROS running as it directly receives command from the controller and interprets in OpenCR. Let me create a recovery image of Melodic for RPi3B+ and see if it works for you. This may take a few days. Thank you.
Paulino1956
commented
3 years ago Fantastic ! Thank you!
Paulino
On Mar 7, 2021, at 7:50 PM, Will Son notifications@github.com wrote:
@Paulino1956 Hi, operating TurtleBot3 with RC-100 remote controller doesn't reuquire ROS running as it directly receives command from the controller and interprets in OpenCR. Let me create a recovery image of Melodic for RPi3B+ and see if it works for you. This may take a few days. Thank you.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago @Paulino1956 Hi, here's the Melodic test image for Raspberry Pi 3B+ that I built with my TurtleBot3 burger. https://www.robotis.com/service/download.php?no=2011
The user name is ubuntu and the password is turtlebot
Before using it, you need to open and modify the network settings.
$ sudo nano /etc/netplan/50-cloud-init.yamlReplace the WIFI_SSID and WIFI_PASSWORD for your wifi settings.

Then open the ~/.bashrc file
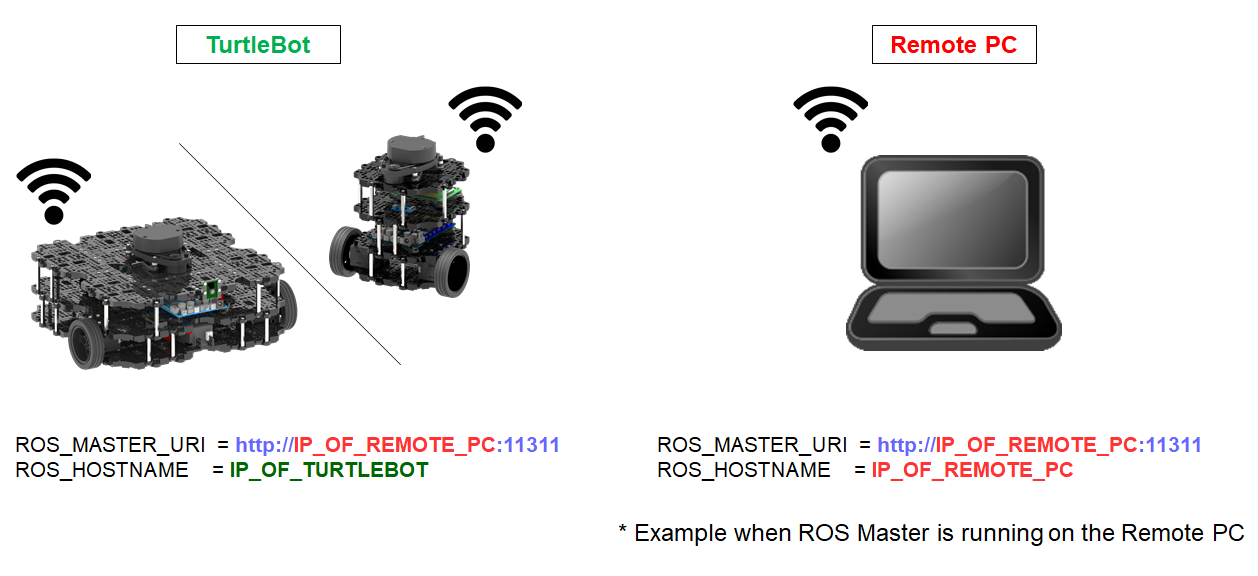
$ nano ~/.bashrcModify where ROS_MASTER_URI, ROS_HOSTNAME, TURTLEBOT3_MODEL are defined.
# Replace IP_ADDRESS_OF_REMOTE_PC with the IP address of remote pc
# Both Remote PC and Raspberry Pi should be connected in the same local network
# e.g) export ROS_MASTER_URI=http://192.168.0.10:11311
export ROS_MASTER_URI=http://localhost:11311
# Replace IP_ADDRESS_OF_RASPBERRY_PI with the IP address of Raspberry Pi
# e.g) export ROS_HOSTNAME=192.168.0.11
export ROS_HOSTNAME=localhost
export TURTLEBOT3_MODEL=burgerHello !
I executed the instructions as per your e-mail, and was able to make the Pi to access the Wi-Fi, and use ifconfig to get an IP address. As per the instructions, I made the modifications (on the nano ~/.bashrc ) using the new IP address.
After that, I was able to run ssh from the remote PC and connected to the Pi. I executed the procedure to the SBC set up and install the complete configuration including : ROS Melodic Meronia, the ROS Packages and Network Configuration. I started the installation of the OpenCR set up and had to stop, but properly shut down the PI. When I returned to ssh via the remote terminal it was not able to connect to the Pi again.
I run the PI on a terminal and use ifconfig to get the IP address, and got this message below:
The Pi is not connecting to the network, which was the same issue I experienced before. It seems like something - removes the Pi from the network - when we install ROS.
Again, I really do appreciate your continuous support.
Thanks,
Paulino
Sent from my iPad
On Mar 9, 2021, at 11:26 PM, Will Son @.***> wrote:
@Paulino1956 Hi, here's the Melodic test image for Raspberry Pi 3B+ that I built with my TurtleBot3 burger. https://www.robotis.com/service/download.php?no=2011
The user name is ubuntu and the password is turtlebot
Before using it, you need to open and modify the network settings.
$ sudo nano /etc/netplan/50-cloud-init.yaml Replace the WIFI_SSID and WIFI_PASSWORD for your wifi settings.
Then open the ~/.bashrc file
$ nano ~/.bashrc Modify where ROS_MASTER_URI, ROS_HOSTNAME, TURTLEBOT3_MODEL are defined.
Replace IP_ADDRESS_OF_REMOTE_PC with the IP address of remote pc
Both Remote PC and Raspberry Pi should be connected in the same local network
e.g) export ROS_MASTER_URI=http://192.168.0.10:11311
export ROS_MASTER_URI=http://localhost:11311
Replace IP_ADDRESS_OF_RASPBERRY_PI with the IP address of Raspberry Pi
e.g) export ROS_HOSTNAME=192.168.0.11
export ROS_HOSTNAME=localhost
export TURTLEBOT3_MODEL=burger — You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago @Paulino1956 The image I uploaded has all the setup for SBC and you only need to configure the wifi and network settings as I described earlier. Do NOT proceed additional SBC setup with the image. Thank you.
Paulino1956
commented
3 years ago Thanks ! Will do it again !
Paulino
On Mar 10, 2021, at 11:15 PM, Will Son @.***> wrote:
@Paulino1956 The image I uploaded has all the setup for SBC and you only need to configure the wifi and network settings as I described earlier. Do NOT proceed additional SBC setup with the image. Thank you.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
Paulino1956
commented
3 years ago Achieved good progress! Almost there, but I experiencing few more issues:
Problem 1- Got everything working via ssh and follow instruction and launched Bringup, then teleoperation. I got the expected screen results, follow the instructions toon, but was not able to make the turtlebot wheels to move/rotate via the screen commands (I.e. moving around : a,w,s,x and d). At the same time, the terminal was responding and registering linear and angular velocity like the movement was happening.
Problem 2-
Run rqt - it did not work, and got the following results :
I was able to run SLAM Node successfully, and got RVIZ operating on the screen. Then, I run the Teleoperation Node procedure, but again was not able to move the Turtlebot from the Remote PC.
Problem 3- I was note able to run the Navigation Node. When I run (on the Remote PC) the instruction $ roslaunch turtlebot3_navigation.launch map_file:=$HOME/map.yaml, the RVIZ did not run properly on the screen and it shutdown after trying to locate the map.
Thanks in advance for your support!
Paulino
Sent from my iPad
On Mar 10, 2021, at 11:15 PM, Will Son @.***> wrote: @Paulino1956 The image I uploaded has all the setup for SBC and you only need to configure the wifi and network settings as I described earlier. Do NOT proceed additional SBC setup with the image. Thank you.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago @Paulino1956 Hi, please check below options.
$ sudo apt-get install ros-melodic-rqt*Paulino1956
commented
3 years ago Hello !
I have executed the instruction 1, 2, 3 and all worked fine. I have executed instruction 4 ($ sudo apt-get install ros-melodic-rqt*), but I am still not able to run rqt. And this is the screen message I get when I execute $rqt: $ rqt [ERROR] [1615585777.000866575]: Skipped loading plugin with error: XML Document '/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml' has no Root Element. This likely means the XML is malformed or missing.. RosPluginProvider._parse_plugin_xml() plugin file "/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml" in package "rqt_virtual_joy" not found RosPluginProvider._parse_plugin_xml() plugin file "/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml" in package "rqt_virtual_joy" not found
Also, I am still not able to move the wheels from the PC. Message on screen: $ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch ... logging to /home/paulino/.ros/log/07e97012-837b-11eb-b010-d8c0a6261e0f/roslaunch-paulino-desktop-13402.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.0.0.115:40941/
PARAMETERS
NODES / turtlebot3_teleop_keyboard (turtlebot3_teleop/turtlebot3_teleop_key)
ROS_MASTER_URI=http://10.0.0.115:11311
process[turtlebot3_teleop_keyboard-1]: started with pid [13417]
Moving around: w a s d x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26) a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
At the same time, the terminal was responding and registering linear and angular velocity like the movement was happening: Moving around: w a s d x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26) a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
At the same time, the terminal was responding and registering linear and angular velocity like the movement was happening:
currently: linear vel 0.01 angular vel 0.0 currently: linear vel 0.02 angular vel 0.0 currently: linear vel 0.03 angular vel 0.0 currently: linear vel 0.04 angular vel 0.0 currently: linear vel 0.05 angular vel 0.0 currently: linear vel 0.06 angular vel 0.0 currently: linear vel 0.07 angular vel 0.0 currently: linear vel 0.08 angular vel 0.0 currently: linear vel 0.09 angular vel 0.0 currently: linear vel 0.1 angular vel 0.0 currently: linear vel 0.11 angular vel 0.0
NEXT - I have been able to execute on th Pi: @. (pi) :~$ roslaunch turtlebot3_bringup turtlebot3_robot.launch, then executed on PC : @.:~$ roslaunch turtlebot3_slam turtlebot3_slam.launch,and got the RVIz
But not able to move the wheels.
Again, Thanks in advance for your support ! Have a nice weekend !
Paulino
On Thu, Mar 11, 2021 at 7:43 PM Will Son @.***> wrote:
@Paulino1956 https://github.com/Paulino1956 Hi, please check below options.
Make sure to correctly set up the network configuration for both Raspberry Pi and Remote PC.
- Make sure that you have correctly setup the OpenCR firmware https://emanual.robotis.com/docs/en/platform/turtlebot3/opencr_setup/#opencr-setup .
- Try time sync https://emanual.robotis.com/docs/en/platform/turtlebot3/faq/#timesync-between-turtlebot3-and-remote-pc for both Raspberry Pi and Remote PC
- I don't see the attached image. Replying directly via email doesn't include attached images. If you haven't installed rqt, please install with $ sudo apt-get install ros-melodic-rqt*
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/ROBOTIS-GIT/turtlebot3/issues/703#issuecomment-797153090, or unsubscribe https://github.com/notifications/unsubscribe-auth/APSHUY3H25BVIAEVDC5CQE3TDFPU3ANCNFSM4XSSQROA .
ROBOTIS-Will
commented
3 years ago Hi, What did you get from running the rqt install command below? Were there any errors or warnings?
$ sudo apt-get install ros-melodic-rqt*Could you try reading the ROS topics from the Raspberry Pi on TurtleBot3 with the command below?
$ rostopic listI'm not sure why rqt is not working with your PC. I'd recommend to reinstall the desktop full version of ROS and TurtleBot3 packages on your PC.
Paulino1956
commented
3 years ago Thanks! Will do it!
What about the other issue:
I am still not able to move the wheels from the PC. Message on screen: $ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch ... logging to /home/paulino/.ros/log/07e97012-837b-11eb-b010-d8c0a6261e0f/roslaunch-paulino-desktop-13402.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.0.0.115:40941/
PARAMETERS
NODES / turtlebot3_teleop_keyboard (turtlebot3_teleop/turtlebot3_teleop_key)
ROS_MASTER_URI=http://10.0.0.115:11311
process[turtlebot3_teleop_keyboard-1]: started with pid [13417]
Moving around: w a s d x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26) a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
At the same time, the terminal was responding and registering linear and angular velocity like the movement was happening: Moving around: w a s d x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26) a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
Thanks again!
Paulino
On Mar 14, 2021, at 8:52 PM, Will Son @.***> wrote:
Hi, What did you get from running the rqt install command below? Were there any errors or warnings?
$ sudo apt-get install ros-melodic-rqt* Could you try reading the ROS topics from the Raspberry Pi on TurtleBot3 with the command below?
$ rostopic list I'm not sure why rqt is not working with your PC. I'd recommend to reinstall the desktop full version of ROS and TurtleBot3 packages on your PC.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago I need to see if Raspberry Pi and Remote PC is properly connected in the same network and sharing the ROS topics to each other.
In order to confirm this, $ rostopic list will list up the topics in the current network.
Also, when running the teleop keyboard from the remote PC, check if cmd_vel topic is correctly updated from the Raspberry Pi with entering below command.
$ rostopic echo /cmd_vel👍! Will do !
And, thanks again !
Paulino
On Mar 14, 2021, at 10:23 PM, Will Son @.***> wrote:
I need to see if Raspberry Pi and Remote PC is properly connected in the same network and sharing the ROS topics to each other. In order to confirm this, $ rostopic list will list up the topics in the current network. Also, when running the teleop keyboard from the remote PC, check if cmd_vel topic is correctly updated from the Raspberry Pi with entering below command.
$ rostopic echo /cmd_vel — You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
Paulino1956
commented
3 years ago Hello !
On the PC-
This is what I get when I run - $ sudo apt-get install ros-melodic-rqt* : @.**:~$ sudo apt-get install ros-melodic-rqt [sudo] password for paulino: Reading package lists... Done Building dependency tree Reading state information... Done Note, selecting 'ros-melodic-rqt-runtime-monitor' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-multiplot' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-py-trees' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-virtual-joy' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rviz-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-play-motion-builder' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-controller-manager' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-multiplot-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-joint-trajectory-controller' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rosmon' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-py-console' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-image-view' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-service-caller' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-publisher' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-topic' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui-cpp' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui-cpp-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-bag' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-dashboard' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-common-plugins' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-launch' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-plot' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-steering' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-dep' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-action' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-ez-publisher' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui-py' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-moveit' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-shell' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-msg' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-monitor' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-reconfigure' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-tf-tree' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-py-common' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-console' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-srv' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-top' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-pose-view' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-play-motion-builder-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rosmon-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-drone-teleop' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-web' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-graph' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-logger-level' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-plugins' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rotors' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-nav-view' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-joint-trajectory-plot' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-ground-robot-teleop' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-bag-plugins' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rviz' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-image-view-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-launchtree' for glob 'ros-melodic-rqt*' ros-melodic-rqt is already the newest version (0.5.2-1bionic.20201020.103021). ros-melodic-rqt-action is already the newest version (0.4.9-0bionic.20210114.113647). ros-melodic-rqt-bag is already the newest version (0.5.1-1bionic.20210219.184131). ros-melodic-rqt-bag-plugins is already the newest version (0.5.1-1bionic.20210219.190046). ros-melodic-rqt-common-plugins is already the newest version (0.4.8-0bionic.20210219.191347). ros-melodic-rqt-console is already the newest version (0.4.9-1bionic.20210114.100539). ros-melodic-rqt-controller-manager is already the newest version (0.18.3-1bionic.20201207.214804). ros-melodic-rqt-dep is already the newest version (0.4.9-0bionic.20201020.091518). ros-melodic-rqt-drone-teleop is already the newest version (1.3.6-1bionic.20210215.220745). ros-melodic-rqt-ez-publisher is already the newest version (0.5.0-1bionic.20210113.221438). ros-melodic-rqt-graph is already the newest version (0.4.11-1bionic.20201020.061654). ros-melodic-rqt-ground-robot-teleop is already the newest version (1.3.6-1bionic.20210113.044348). ros-melodic-rqt-gui is already the newest version (0.5.2-1bionic.20201020.015631). ros-melodic-rqt-gui-cpp is already the newest version (0.5.2-1bionic.20201020.020218). ros-melodic-rqt-gui-cpp-dbgsym is already the newest version (0.5.2-1bionic.20201020.020218). ros-melodic-rqt-gui-py is already the newest version (0.5.2-1bionic.20201020.021601). ros-melodic-rqt-image-view is already the newest version (0.4.16-1bionic.20210113.164743). ros-melodic-rqt-image-view-dbgsym is already the newest version (0.4.16-1bionic.20210113.164743). ros-melodic-rqt-joint-trajectory-controller is already the newest version (0.17.2-1bionic.20210120.183150). ros-melodic-rqt-joint-trajectory-plot is already the newest version (0.0.5-1bionic.20210113.144730). ros-melodic-rqt-launch is already the newest version (0.4.8-0bionic.20210114.101050). ros-melodic-rqt-launchtree is already the newest version (0.2.0-1bionic.20201020.101056). ros-melodic-rqt-logger-level is already the newest version (0.4.8-0bionic.20201020.091503). ros-melodic-rqt-moveit is already the newest version (0.5.7-0bionic.20210113.181448). ros-melodic-rqt-msg is already the newest version (0.4.8-0bionic.20210114.101208). ros-melodic-rqt-multiplot is already the newest version (0.0.10-0bionic.20210114.061826). ros-melodic-rqt-multiplot-dbgsym is already the newest version (0.0.10-0bionic.20210114.061826). ros-melodic-rqt-nav-view is already the newest version (0.5.7-0bionic.20210113.221517). ros-melodic-rqt-play-motion-builder is already the newest version (1.0.2-1bionic.20210113.161721). ros-melodic-rqt-play-motion-builder-dbgsym is already the newest version (1.0.2-1bionic.20210113.161721). ros-melodic-rqt-plot is already the newest version (0.4.9-0bionic.20210114.100633). ros-melodic-rqt-pose-view is already the newest version (0.5.8-0bionic.20210113.220210). ros-melodic-rqt-publisher is already the newest version (0.4.8-0bionic.20210114.100748). ros-melodic-rqt-py-common is already the newest version (0.5.2-1bionic.20210113.180119). ros-melodic-rqt-py-console is already the newest version (0.4.8-0bionic.20201020.023225). ros-melodic-rqt-py-trees is already the newest version (0.3.1-0bionic.20210219.190058). ros-melodic-rqt-reconfigure is already the newest version (0.5.3-1bionic.20210114.101303). ros-melodic-rqt-robot-dashboard is already the newest version (0.5.7-0bionic.20210219.190145). ros-melodic-rqt-robot-monitor is already the newest version (0.5.13-1bionic.20210219.185318). ros-melodic-rqt-robot-plugins is already the newest version (0.5.7-0bionic.20210219.190509). ros-melodic-rqt-robot-steering is already the newest version (0.5.10-1bionic.20210113.121613). ros-melodic-rqt-rosmon is already the newest version (2.3.2-1bionic.20201020.022457). ros-melodic-rqt-rosmon-dbgsym is already the newest version (2.3.2-1bionic.20201020.022457). ros-melodic-rqt-rotors is already the newest version (2.2.3-0bionic.20210215.201908). ros-melodic-rqt-runtime-monitor is already the newest version (0.5.7-0bionic.20210113.042942). ros-melodic-rqt-rviz is already the newest version (0.6.0-0bionic.20210206.160356). ros-melodic-rqt-rviz-dbgsym is already the newest version (0.6.0-0bionic.20210206.160356). ros-melodic-rqt-service-caller is already the newest version (0.4.8-0bionic.20210114.100855). ros-melodic-rqt-shell is already the newest version (0.4.9-0bionic.20201020.023342). ros-melodic-rqt-srv is already the newest version (0.4.8-0bionic.20210114.193756). ros-melodic-rqt-tf-tree is already the newest version (0.6.0-0bionic.20210113.193336). ros-melodic-rqt-top is already the newest version (0.4.8-0bionic.20201020.023339). ros-melodic-rqt-topic is already the newest version (0.4.11-1bionic.20201020.082857). ros-melodic-rqt-virtual-joy is already the newest version (0.1.2-1bionic.20210113.162105). ros-melodic-rqt-web is already the newest version (0.4.8-0bionic.20201020.023405). 0 upgraded, 0 newly installed, 0 to remove and 4 not upgraded.
On the Pi (via SSH from the PC)-
This is what I get when I run : $ rostopic list @.:~$ rostopic list ERROR: Unable to communicate with master! @.:~$
also on the Pi (via ssh from the PC) - @.***:~$ rostopic echo /cmd_vel ERROR: Unable to communicate with master!
I will reinstall ROS on the PC and get back to you shortly.
Thanks,
Paulino
On Sun, Mar 14, 2021 at 8:52 PM Will Son @.***> wrote:
Hi, What did you get from running the rqt install command below? Were there any errors or warnings?
$ sudo apt-get install ros-melodic-rqt*
Could you try reading the ROS topics from the Raspberry Pi on TurtleBot3 with the command below?
$ rostopic list
I'm not sure why rqt is not working with your PC. I'd recommend to reinstall the desktop full version of ROS and TurtleBot3 packages on your PC.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/ROBOTIS-GIT/turtlebot3/issues/703#issuecomment-799019625, or unsubscribe https://github.com/notifications/unsubscribe-auth/APSHUY2ADAUWGZF3DY6Z7UDTDVK4VANCNFSM4XSSQROA .
Paulino1956
commented
3 years ago Some more progress today !!
I was able to execute on PC - @.***:~$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch and GOT TO OPERATE Turtlebot via Teleoperation/Keyboard.
Also, and as per your recommendation, I executed on Pi:
@.***:~$ rostopic list
/battery_state /clicked_point /cmd_vel /cmd_vel_rc100 /diagnostics /firmware_version /imu /initialpose /joint_states /magnetic_field /motor_power /move_base_simple/goal /odom /reset /rosout /rosout_agg /rpms /scan /sensor_state /sound /tf /tf_static /version_info
and executed the $ rostopic echo /cmd_vel (while running the Teleoperation)
@.***:~$ rostopic echo /cmd_vel linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0
Now, I am still having problems when I execute
@.***:~$ rqt [ERROR] [1615842639.190347851]: Skipped loading plugin with error: XML Document '/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml' has no Root Element. This likely means the XML is malformed or missing.. RosPluginProvider._parse_plugin_xml() plugin file "/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml" in package "rqt_virtual_joy" not found RosPluginProvider._parse_plugin_xml() plugin file "/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml" in package "rqt_virtual_joy" not found
@.**:~$ sudo apt-get install ros-melodic-rqt
@.:~$ sudo apt-get install ros-melodic-rqt [sudo] password for paulino: Reading package lists... Done Building dependency tree Reading state information... Done Note, selecting 'ros-melodic-rqt-runtime-monitor' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-multiplot' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-py-trees' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-virtual-joy' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rviz-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-play-motion-builder' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-controller-manager' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-multiplot-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-joint-trajectory-controller' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rosmon' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-py-console' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-image-view' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-service-caller' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-publisher' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-topic' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui-cpp' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui-cpp-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-bag' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-dashboard' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-common-plugins' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-launch' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-plot' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-steering' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-dep' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-action' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-ez-publisher' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-gui-py' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-moveit' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-shell' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-msg' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-monitor' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-reconfigure' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-tf-tree' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-py-common' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-console' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-srv' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-top' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-pose-view' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-play-motion-builder-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rosmon-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-drone-teleop' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-web' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-graph' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-logger-level' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-robot-plugins' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rotors' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-nav-view' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-joint-trajectory-plot' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-ground-robot-teleop' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-bag-plugins' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-rviz' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-image-view-dbgsym' for glob 'ros-melodic-rqt' Note, selecting 'ros-melodic-rqt-launchtree' for glob 'ros-melodic-rqt' ros-melodic-rqt is already the newest version (0.5.2-1bionic.20201020.103021). ros-melodic-rqt-action is already the newest version (0.4.9-0bionic.20210114.113647). ros-melodic-rqt-bag is already the newest version (0.5.1-1bionic.20210219.184131). ros-melodic-rqt-bag-plugins is already the newest version (0.5.1-1bionic.20210219.190046). ros-melodic-rqt-common-plugins is already the newest version (0.4.8-0bionic.20210219.191347). ros-melodic-rqt-console is already the newest version (0.4.9-1bionic.20210114.100539). ros-melodic-rqt-controller-manager is already the newest version (0.18.3-1bionic.20201207.214804). ros-melodic-rqt-dep is already the newest version (0.4.9-0bionic.20201020.091518). ros-melodic-rqt-drone-teleop is already the newest version (1.3.6-1bionic.20210215.220745). ros-melodic-rqt-ez-publisher is already the newest version (0.5.0-1bionic.20210113.221438). ros-melodic-rqt-graph is already the newest version (0.4.11-1bionic.20201020.061654). ros-melodic-rqt-ground-robot-teleop is already the newest version (1.3.6-1bionic.20210113.044348). ros-melodic-rqt-gui is already the newest version (0.5.2-1bionic.20201020.015631). ros-melodic-rqt-gui-cpp is already the newest version (0.5.2-1bionic.20201020.020218). ros-melodic-rqt-gui-cpp-dbgsym is already the newest version (0.5.2-1bionic.20201020.020218). ros-melodic-rqt-gui-py is already the newest version (0.5.2-1bionic.20201020.021601). ros-melodic-rqt-image-view is already the newest version (0.4.16-1bionic.20210113.164743). ros-melodic-rqt-image-view-dbgsym is already the newest version (0.4.16-1bionic.20210113.164743). ros-melodic-rqt-joint-trajectory-controller is already the newest version (0.17.2-1bionic.20210120.183150). ros-melodic-rqt-joint-trajectory-plot is already the newest version (0.0.5-1bionic.20210113.144730). ros-melodic-rqt-launch is already the newest version (0.4.8-0bionic.20210114.101050). ros-melodic-rqt-launchtree is already the newest version (0.2.0-1bionic.20201020.101056). ros-melodic-rqt-logger-level is already the newest version (0.4.8-0bionic.20201020.091503). ros-melodic-rqt-moveit is already the newest version (0.5.7-0bionic.20210113.181448). ros-melodic-rqt-msg is already the newest version (0.4.8-0bionic.20210114.101208). ros-melodic-rqt-multiplot is already the newest version (0.0.10-0bionic.20210114.061826). ros-melodic-rqt-multiplot-dbgsym is already the newest version (0.0.10-0bionic.20210114.061826). ros-melodic-rqt-nav-view is already the newest version (0.5.7-0bionic.20210113.221517). ros-melodic-rqt-play-motion-builder is already the newest version (1.0.2-1bionic.20210113.161721). ros-melodic-rqt-play-motion-builder-dbgsym is already the newest version (1.0.2-1bionic.20210113.161721). ros-melodic-rqt-plot is already the newest version (0.4.9-0bionic.20210114.100633). ros-melodic-rqt-pose-view is already the newest version (0.5.8-0bionic.20210113.220210). ros-melodic-rqt-publisher is already the newest version (0.4.8-0bionic.20210114.100748). ros-melodic-rqt-py-common is already the newest version (0.5.2-1bionic.20210113.180119). ros-melodic-rqt-py-console is already the newest version (0.4.8-0bionic.20201020.023225). ros-melodic-rqt-py-trees is already the newest version (0.3.1-0bionic.20210219.190058). ros-melodic-rqt-reconfigure is already the newest version (0.5.3-1bionic.20210114.101303). ros-melodic-rqt-robot-dashboard is already the newest version (0.5.7-0bionic.20210219.190145). ros-melodic-rqt-robot-monitor is already the newest version (0.5.13-1bionic.20210219.185318). ros-melodic-rqt-robot-plugins is already the newest version (0.5.7-0bionic.20210219.190509). ros-melodic-rqt-robot-steering is already the newest version (0.5.10-1bionic.20210113.121613). ros-melodic-rqt-rosmon is already the newest version (2.3.2-1bionic.20201020.022457). ros-melodic-rqt-rosmon-dbgsym is already the newest version (2.3.2-1bionic.20201020.022457). ros-melodic-rqt-rotors is already the newest version (2.2.3-0bionic.20210215.201908). ros-melodic-rqt-runtime-monitor is already the newest version (0.5.7-0bionic.20210113.042942). ros-melodic-rqt-rviz is already the newest version (0.6.0-0bionic.20210206.160356). ros-melodic-rqt-rviz-dbgsym is already the newest version (0.6.0-0bionic.20210206.160356). ros-melodic-rqt-service-caller is already the newest version (0.4.8-0bionic.20210114.100855). ros-melodic-rqt-shell is already the newest version (0.4.9-0bionic.20201020.023342). ros-melodic-rqt-srv is already the newest version (0.4.8-0bionic.20210114.193756). ros-melodic-rqt-tf-tree is already the newest version (0.6.0-0bionic.20210113.193336). ros-melodic-rqt-top is already the newest version (0.4.8-0bionic.20201020.023339). ros-melodic-rqt-topic is already the newest version (0.4.11-1bionic.20201020.082857). ros-melodic-rqt-virtual-joy is already the newest version (0.1.2-1bionic.20210113.162105). ros-melodic-rqt-web is already the newest version (0.4.8-0bionic.20201020.023405). 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded. @.:~$
Thanks ! and Looking forward to get your feedback !
Paulino
On Sun, Mar 14, 2021 at 8:52 PM Will Son @.***> wrote:
Hi, What did you get from running the rqt install command below? Were there any errors or warnings?
$ sudo apt-get install ros-melodic-rqt*
Could you try reading the ROS topics from the Raspberry Pi on TurtleBot3 with the command below?
$ rostopic list
I'm not sure why rqt is not working with your PC. I'd recommend to reinstall the desktop full version of ROS and TurtleBot3 packages on your PC.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/ROBOTIS-GIT/turtlebot3/issues/703#issuecomment-799019625, or unsubscribe https://github.com/notifications/unsubscribe-auth/APSHUY2ADAUWGZF3DY6Z7UDTDVK4VANCNFSM4XSSQROA .
Paulino1956
commented
3 years ago Some more progress today !!
I was able to execute on PC - @.***:~$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch and GOT TO OPERATE Turtlebot via Teleoperation/Keyboard.
Also, and as per your recommendation, I executed on Pi:
@.***:~$ rostopic list
/battery_state /clicked_point /cmd_vel /cmd_vel_rc100 /diagnostics /firmware_version /imu /initialpose /joint_states /magnetic_field /motor_power /move_base_simple/goal /odom /reset /rosout /rosout_agg /rpms /scan /sensor_state /sound /tf /tf_static /version_info
and executed the $ rostopic echo /cmd_vel (while running the Teleoperation)
@.***:~$ rostopic echo /cmd_vel linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0
Now, I am still having problems when I execute
@.***:~$ rqt [ERROR] [1615842639.190347851]: Skipped loading plugin with error: XML Document '/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml' has no Root Element. This likely means the XML is malformed or missing.. RosPluginProvider._parse_plugin_xml() plugin file "/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml" in package "rqt_virtual_joy" not found RosPluginProvider._parse_plugin_xml() plugin file "/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml" in package "rqt_virtual_joy" not found
@.**:~$ sudo apt-get install ros-melodic-rqt
@.:~$ sudo apt-get install ros-melodic-rqt
[sudo] password for paulino:
Reading package lists... Done
Building dependency tree
Reading state information... Done
Note, selecting 'ros-melodic-rqt-runtime-monitor' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-multiplot' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-py-trees' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-virtual-joy' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-rviz-dbgsym' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-play-motion-builder' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-controller-manager' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-multiplot-dbgsym' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-joint-trajectory-controller' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-rosmon' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-py-console' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-image-view' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-service-caller' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-publisher' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-topic' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-gui-cpp' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-gui-cpp-dbgsym' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-bag' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-robot-dashboard' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-common-plugins' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-launch' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-plot' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-robot-steering' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-dep' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-gui' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-action' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-ez-publisher' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-gui-py' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-moveit' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-shell' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-msg' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-robot-monitor' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-reconfigure' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-tf-tree' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-py-common' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-console' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-srv' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-top' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-pose-view' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-play-motion-builder-dbgsym' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-rosmon-dbgsym' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-drone-teleop' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-web' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-graph' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-logger-level' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-robot-plugins' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-rotors' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-nav-view' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-joint-trajectory-plot' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-ground-robot-teleop' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-bag-plugins' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-rviz' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-image-view-dbgsym' for glob 'ros-melodic-rqt'
Note, selecting 'ros-melodic-rqt-launchtree' for glob 'ros-melodic-rqt'
ros-melodic-rqt is already the newest version (0.5.2-1bionic.20201020.103021).
ros-melodic-rqt-action is already the newest version (0.4.9-0bionic.20210114.113647).
ros-melodic-rqt-bag is already the newest version (0.5.1-1bionic.20210219.184131).
ros-melodic-rqt-bag-plugins is already the newest version (0.5.1-1bionic.20210219.190046).
ros-melodic-rqt-common-plugins is already the newest version (0.4.8-0bionic.20210219.191347).
ros-melodic-rqt-console is already the newest version (0.4.9-1bionic.20210114.100539).
ros-melodic-rqt-controller-manager is already the newest version (0.18.3-1bionic.20201207.214804).
ros-melodic-rqt-dep is already the newest version (0.4.9-0bionic.20201020.091518).
ros-melodic-rqt-drone-teleop is already the newest version (1.3.6-1bionic.20210215.220745).
ros-melodic-rqt-ez-publisher is already the newest version (0.5.0-1bionic.20210113.221438).
ros-melodic-rqt-graph is already the newest version (0.4.11-1bionic.20201020.061654).
ros-melodic-rqt-ground-robot-teleop is already the newest version (1.3.6-1bionic.20210113.044348).
ros-melodic-rqt-gui is already the newest version (0.5.2-1bionic.20201020.015631).
ros-melodic-rqt-gui-cpp is already the newest version (0.5.2-1bionic.20201020.020218).
ros-melodic-rqt-gui-cpp-dbgsym is already the newest version (0.5.2-1bionic.20201020.020218).
ros-melodic-rqt-gui-py is already the newest version (0.5.2-1bionic.20201020.021601).
ros-melodic-rqt-image-view is already the newest version (0.4.16-1bionic.20210113.164743).
ros-melodic-rqt-image-view-dbgsym is already the newest version (0.4.16-1bionic.20210113.164743).
ros-melodic-rqt-joint-trajectory-controller is already the newest version (0.17.2-1bionic.20210120.183150).
ros-melodic-rqt-joint-trajectory-plot is already the newest version (0.0.5-1bionic.20210113.144730).
ros-melodic-rqt-launch is already the newest version (0.4.8-0bionic.20210114.101050).
ros-melodic-rqt-launchtree is already the newest version (0.2.0-1bionic.20201020.101056).
ros-melodic-rqt-logger-level is already the newest version (0.4.8-0bionic.20201020.091503).
ros-melodic-rqt-moveit is already the newest version (0.5.7-0bionic.20210113.181448).
ros-melodic-rqt-msg is already the newest version (0.4.8-0bionic.20210114.101208).
ros-melodic-rqt-multiplot is already the newest version (0.0.10-0bionic.20210114.061826).
ros-melodic-rqt-multiplot-dbgsym is already the newest version (0.0.10-0bionic.20210114.061826).
ros-melodic-rqt-nav-view is already the newest version (0.5.7-0bionic.20210113.221517).
ros-melodic-rqt-play-motion-builder is already the newest version (1.0.2-1bionic.20210113.161721).
ros-melodic-rqt-play-motion-builder-dbgsym is already the newest version (1.0.2-1bionic.20210113.161721).
ros-melodic-rqt-plot is already the newest version (0.4.9-0bionic.20210114.100633).
ros-melodic-rqt-pose-view is already the newest version (0.5.8-0bionic.20210113.220210).
ros-melodic-rqt-publisher is already the newest version (0.4.8-0bionic.20210114.100748).
ros-melodic-rqt-py-common is already the newest version (0.5.2-1bionic.20210113.180119).
ros-melodic-rqt-py-console is already the newest version (0.4.8-0bionic.20201020.023225).
ros-melodic-rqt-py-trees is already the newest version (0.3.1-0bionic.20210219.190058).
ros-melodic-rqt-reconfigure is already the newest version (0.5.3-1bionic.20210114.101303).
ros-melodic-rqt-robot-dashboard is already the newest version (0.5.7-0bionic.20210219.190145).
ros-melodic-rqt-robot-monitor is already the newest version (0.5.13-1bionic.20210219.185318).
ros-melodic-rqt-robot-plugins is already the newest version (0.5.7-0bionic.20210219.190509).
ros-melodic-rqt-robot-steering is already the newest version (0.5.10-1bionic.20210113.121613).
ros-melodic-rqt-rosmon is already the newest version (2.3.2-1bionic.20201020.022457).
ros-melodic-rqt-rosmon-dbgsym is already the newest version (2.3.2-1bionic.20201020.022457).
ros-melodic-rqt-rotors is already the newest version (2.2.3-0bionic.20210215.201908).
ros-melodic-rqt-runtime-monitor is already the newest version (0.5.7-0bionic.20210113.042942).
ros-melodic-rqt-rviz is already the newest version (0.6.0-0bionic.20210206.160356).
ros-melodic-rqt-rviz-dbgsym is already the newest version (0.6.0-0bionic.20210206.160356).
ros-melodic-rqt-service-caller is already the newest version (0.4.8-0bionic.20210114.100855).
ros-melodic-rqt-shell is already the newest version (0.4.9-0bionic.20201020.023342).
ros-melodic-rqt-srv is already the newest version (0.4.8-0bionic.20210114.193756).
ros-melodic-rqt-tf-tree is already the newest version (0.6.0-0bionic.20210113.193336).
ros-melodic-rqt-top is already the newest version (0.4.8-0bionic.20201020.023339).
ros-melodic-rqt-topic is already the newest version (0.4.11-1bionic.20201020.082857).
ros-melodic-rqt-virtual-joy is already the newest version (0.1.2-1bionic.20210113.162105).
ros-melodic-rqt-web is already the newest version (0.4.8-0bionic.20201020.023405).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
@.:~$
Thanks ! and Looking forward to get your feedback !
Paulino
On Mar 14, 2021, at 10:23 PM, Will Son @.***> wrote:
I need to see if Raspberry Pi and Remote PC is properly connected in the same network and sharing the ROS topics to each other. In order to confirm this, $ rostopic list will list up the topics in the current network. Also, when running the teleop keyboard from the remote PC, check if cmd_vel topic is correctly updated from the Raspberry Pi with entering below command.
$ rostopic echo /cmd_vel — You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago Hi @Paulino1956 Could you try below answer and see if it fixes the problem? https://answers.ros.org/question/354039/rqt_virtual_joypluginxml-file-is-missing/
Paulino1956
commented
3 years ago hello there!
Unfortunately it didn't work! I have executed te instructions
You can add plugin.xml in your directory /opt/ros/melodic/share/rqt_virtual_joy.
1.
Go to rqt_virtual_joy directory.
roscd rqt_vritual_joy
2.
Make file plugin.xml
sudo touch plugin.xml
3.
Edit the plugin.xml file with gedit (or other)
sudo gedit plugin.xml
4.
Copy and paste the contents of the plugin.xml file from the rqt_virtual_joystick github https://github.com/aquahika/rqt_virtual_joystick to your plugin.xml.
edit the file plugin.xml
ROBOTIS-Will
commented
3 years ago @Paulino1956 I'm not familiar with the error you are getting. Could you try uninstall and reinstall ROS?
Paulino1956
commented
3 years ago Well, I have already done that on both the PC and the Pi. I am using the following image on the Pi: https://www.robotis.com/service/download.php?no=2011 , which was sent by you guys. The original e-manual image for the PI ( http://old-releases.ubuntu.com/releases/18.04.3/ubuntu-18.04.3-preinstalled-server-arm64+raspi3.img.xz) it was disconnecting the Pi from the WI-FI network. However, when I run the e-manual image on the Pi, I was able to run the instruction $rqt.
Thanks fo your help !
Paulino
Sent from my iPad
On Mar 17, 2021, at 9:44 PM, Will Son @.***> wrote: @Paulino1956 I'm not familiar with the error you are getting. Could you try uninstall and reinstall ROS?
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago @Paulino1956 The TurtleBot3 SBC image that I provided does not support GUI environment, and cannot run rqt on it. Please run the GUI programs such as rqt, rviz, gazebo on the remote PC.
Paulino1956
commented
3 years ago Dear Friends,
For some reason my RPi3 is not connecting to the internet. I had this issue before, but was able to make it connect using the image you sent me in March (please see below). Today, I used/burned the same image (you sent me in March) again in a new micro SD, followed the same instruction and I was not able to make it work. Same issue: the RPi3 does not connect to the internet ($ifconfig > no ip for the RPi3). Is this image still valid? Anyway I have also download and tried the image available on the e-manual and it did not work either.
Thanks in advance for your support!
Paulino
Sent from my iPad
On Mar 9, 2021, at 11:26 PM, Will Son @.***> wrote: @Paulino1956 Hi, here's the Melodic test image for Raspberry Pi 3B+ that I built with my TurtleBot3 burger. https://www.robotis.com/service/download.php?no=2011
The user name is ubuntu and the password is turtlebot
Before using it, you need to open and modify the network settings.
$ sudo nano /etc/netplan/50-cloud-init.yaml Replace the WIFI_SSID and WIFI_PASSWORD for your wifi settings.
Then open the ~/.bashrc file
$ nano ~/.bashrc Modify where ROS_MASTER_URI, ROS_HOSTNAME, TURTLEBOT3_MODEL are defined.
Replace IP_ADDRESS_OF_REMOTE_PC with the IP address of remote pc
Both Remote PC and Raspberry Pi should be connected in the same local network
e.g) export ROS_MASTER_URI=http://192.168.0.10:11311
export ROS_MASTER_URI=http://localhost:11311
Replace IP_ADDRESS_OF_RASPBERRY_PI with the IP address of Raspberry Pi
e.g) export ROS_HOSTNAME=192.168.0.11
export ROS_HOSTNAME=localhost
export TURTLEBOT3_MODEL=burger — You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ROBOTIS-Will
commented
3 years ago Hi @Paulino1956 Recently, the ROS GPG key has been expired which disturbs ROS package update and upgrade. You can follow the instruction below to update the key, but this issue doesn't have to do with the network. https://discourse.ros.org/t/ros-gpg-key-expiration-incident/20669
Paulino1956
commented
3 years ago Thank you! Will try again tomorrow!
Paulino
Sent from my iPad
On Jun 8, 2021, at 8:51 PM, Will Son @.***> wrote:
Hi @Paulino1956 Recently, the ROS GPG key has been expired which disturbs ROS package update and upgrade. You can follow the instruction below to update the key, but this issue doesn't have to do with the network. https://discourse.ros.org/t/ros-gpg-key-expiration-incident/20669
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub, or unsubscribe.
ISSUE TEMPLATE ver. 0.4.0
Which TurtleBot3 platform do you use?
Which ROS is working with TurtleBot3?
Which SBC(Single Board Computer) is working on TurtleBot3?
Which OS you installed on SBC?
Which OS you installed on Remote PC?
Specify the software and firmware version(Can be found from Bringup messages)
Specify the commands or instructions to reproduce the issue.
Copy and Paste the error messages on terminal.
Please describe the issue in detail.
1-running (first) roscore on the PC terminal (Shell 2) and this is what I got : paulino@paulino-desktop:~$ roscore ... logging to /home/paulino/.ros/log/39b280c6-6d63-11eb-979a-d8c0a6261e0f/roslaunch-paulino-desktop-13678.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.0.0.115:33115/ ros_comm version 1.14.10
SUMMARY
PARAMETERS
NODES
auto-starting new master process[master]: started with pid [13689] ROS_MASTER_URI=http://10.0.0.115:11311/
setting /run_id to 39b280c6-6d63-11eb-979a-d8c0a6261e0f process[rosout-1]: started with pid [13700] started core service [/rosout]
2- open shall 1 via ssh and run pi@raspberrypi:~ $ roslaunch turtlebot3_bringup turtlebot3_robot.launch result: ... logging to /home/pi/.ros/log/39b280c6-6d63-11eb-979a-d8c0a6261e0f/roslaunch-raspberrypi-10475.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.0.0.27:37031/
SUMMARY
PARAMETERS
NODES / turtlebot3_core (rosserial_python/serial_node.py) turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics) turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://10.0.0.115:11311
ERROR: cannot launch node of type [rosserial_python/serial_node.py]: rosserial_python ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/home/pi/catkin_ws/src ROS path [2]=/opt/ros/melodic/share ERROR: cannot launch node of type [hls_lfcd_lds_driver/hlds_laser_publisher]: hls_lfcd_lds_driver ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/home/pi/catkin_ws/src ROS path [2]=/opt/ros/melodic/share ERROR: cannot launch node of type [turtlebot3_bringup/turtlebot3_diagnostics]: Cannot locate node of type [turtlebot3_diagnostics] in package [turtlebot3_bringup]. Make sure file exists in package path and permission is set to executable (chmod +x) No processes to monitor shutting down processing monitor... ... shutting down processing monitor complete pi@raspberrypi:~ $
at the pi3 I have installed :
Installing ROS Melodic on the Raspberry Pi (ROS.ORG - http://wiki.ros.org/action/fullsearch/ROSberryPi/Installing%20ROS%20Melodic%20on%20the%20Raspberry%20Pi?action=fullsearch&context=180&value=linkto%3A%22ROSberryPi%2FInstalling+ROS+Melodic+on+the+Raspberry+Pi%22)
at the PC (NVIDIA XAVIER) I have installed : Ubuntu install of ROS Melodic from ROS.org also.
I have check the Network configurations and they are ok for both PC and PI:
PC: export ROS_MASTER_URI=http://10.0.0.115:11311 export ROS_HOSTNAME=10.0.0.115
Pi: export ROS_MASTER_URI=http://10.0.0.115:11311 export ROS_HOSTNAME=10.0.0.27
Thanks