 RandyGaul
commented
1 year ago
RandyGaul
commented
1 year ago The purpose of the collision plane (the manifold) is to define a plane of contact to push the shapes apart along its normal vector. This normal describes the axis of minimum translation to separate the shapes.
We could represent the contact by points along the intersection of edges, but this wouldn’t provide the best results for a collision solver.
We can calculate the depth of the collision by calculating the distance of each point along the normal vector until separation. The depth is already given to you in the manifold struct.
If you’d like to read more about this kind of algorithm there are comments near the bottom of cute_c2.h describing the algorithm and reading materials.
I’m going to close this issue, but you can of course comment here further if you have more questions or want to discuss more.
 Thomas-de-Bock
Thomas-de-Bock

So I'm using this code to get the result between two square polies (I know I shouldnt be using polytopoly for squares but this is for testing).
and print out the points of intersection and vertices, what this prints out in my case is:
these values are all in line with what they should be in my program, but the contact points seem weird to me. I'm using my own rendering code which is still very barebones so to make it clear I plotted the points here: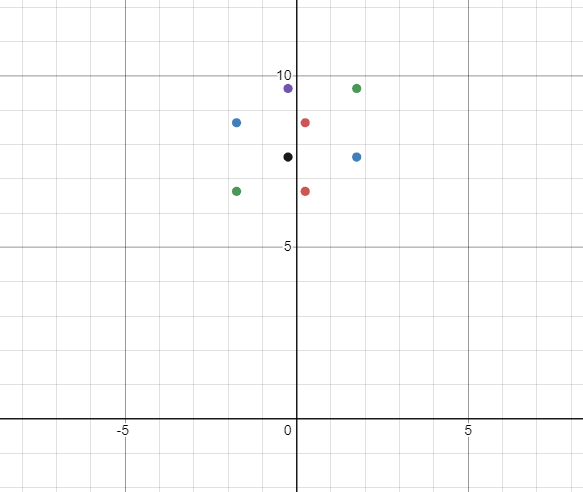
these are the points of the polygons, but when I also plot the contact points, specified with the arrows (one of the points is on the same position as one of the vertices of the right square):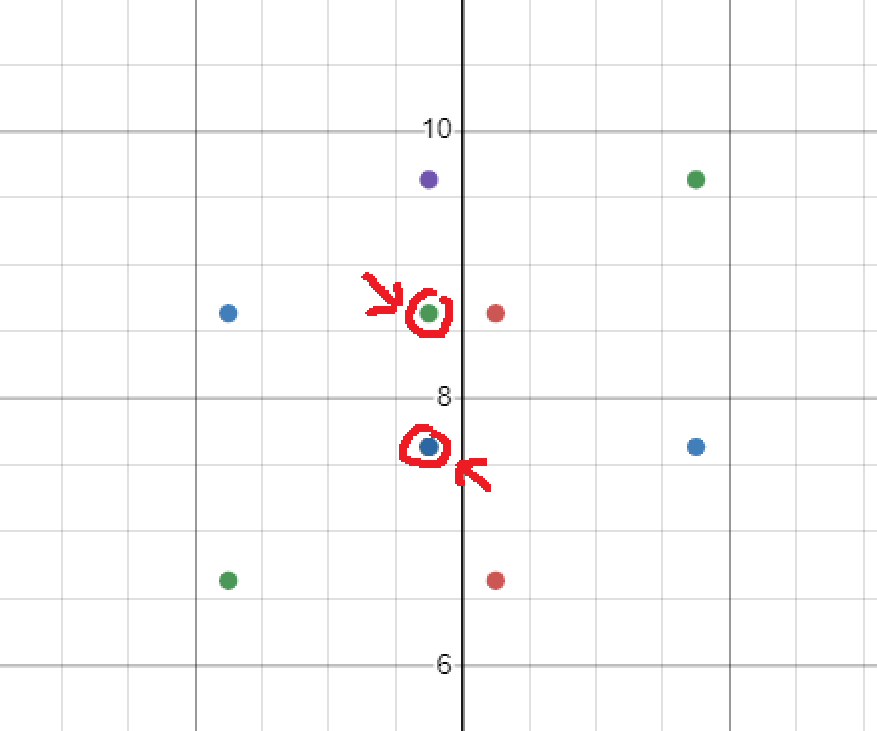
If I'm not mistaken about the definition of contact points in this case shouldn't they be placed here?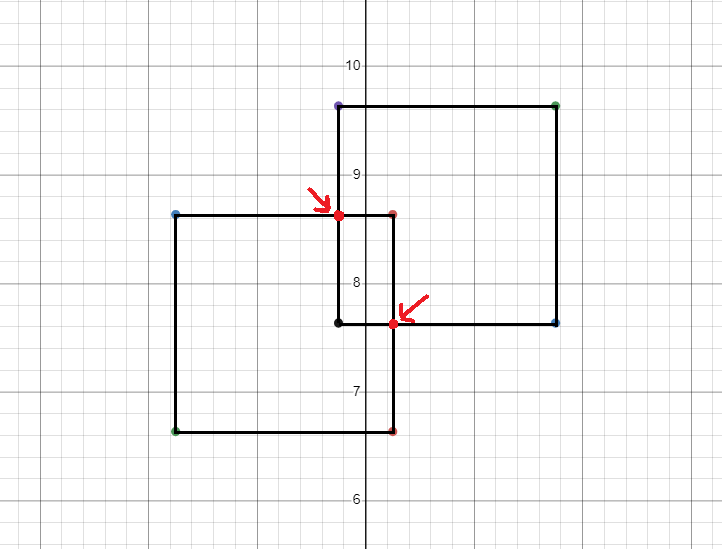
as that is where the lines intersect?
I create the polygons with:
(WorldParticles just contains the world positions of the vertices of the current shape)