 RomanRobotnik
commented
9 years ago
RomanRobotnik
commented
9 years ago Hi,
I don't have a BH280 to test if this is a problem with this version, but I'm going to ask. So far, all the problems seem to be related to the BH280.
Open Randa-Almadhoun opened 9 years ago
RomanRobotnik
commented
9 years ago Hi,
I don't have a BH280 to test if this is a problem with this version, but I'm going to ask. So far, all the problems seem to be related to the BH280.
RomanRobotnik
commented
9 years ago There are a few reasons why the CAN bus would change from READY to FAILURE:
 Randa-Almadhoun
commented
9 years ago
Randa-Almadhoun
commented
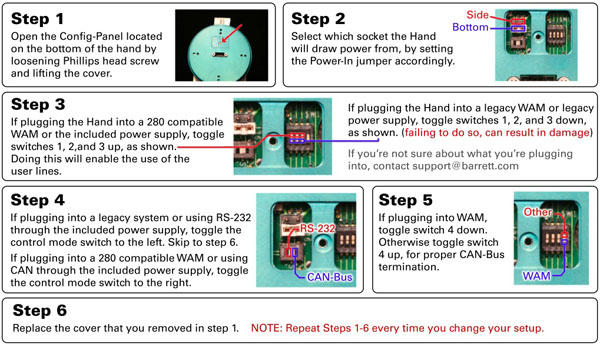
9 years ago I tried the steps suggested for terminating the CAN bus and I also reduced the frequency to 100 but still facing the same problem, The BHand power supply and the computer are plugged into the same power outlet,
The BHand power supply and the BHand setup images are attached



 TarekTaha
commented
9 years ago
TarekTaha
commented
9 years ago to add to Randa's comments: the only way we are currently able to control the barrett hand is through a modified version of the "owd" library, and internally developed ROS package: https://github.com/kuri-kustar/barrett_hand . The modifications we made to the "owd" library were mainly in the CANbus.cc file where we added a call to extra_bus_commands(); after setting the properties https://github.com/kuri-kustar/barrett_hand/blob/master/barrett_hand_hardware_interface/CANbus.cc . We also reduced the PERIOD in the control loop from 2ms to 10ms https://github.com/kuri-kustar/barrett_hand/blob/master/barrett_hand_hardware_interface/owd/openwam/ControlLoop.hh . It seems to me that the CAN reading protocol is not consistent across the barrett hands, or we are using an old firmware.
It would be great if you can fix this issue so we can use your official package.
{kind=link}
Hi
I have the same problem occured in this closed issue : https://github.com/RobotnikAutomation/barrett_hand/issues/1
Initialization fails, following the proposed suggestions written in the closed issue above helped in changing the state into ready state, but it can't move or read the sensors. I am using BH280 + ubuntu 12.04 + peak-linux-7.13 (NET=NO_NETDEV_SUPPORT RT=NO_RT) and I tried different frequencies down to 50 and still facing the same problem.