 sakthivelj
commented
4 years ago
sakthivelj
commented
4 years ago Yes, I am also facing this problem. Why the published velocity drops some time ?? below is my code
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist, Point, Quaternion
from std_msgs.msg import Empty
from nav_msgs.msg import Odometry
from sensor_msgs.msg import JointState
import numpy as np
import tf
from math import radians, copysign, sqrt, pow, pi, atan2
from tf.transformations import euler_from_quaternion
import numpy as np
import math
import time
def move():
cmd_pub=rospy.Publisher('/robot/robotnik_base_control/cmd_vel', Twist, queue_size=5)
twist=Twist()
#Receiving the user's input
print("Lets move your summitxl\n")
speed = input("Input your speed:")
time=input("Input your duration of run:")
r = rospy.Rate(10000)
t0=rospy.get_time()
t1=t0
stline=True
while (stline):
if t1<t0+time:
twist.linear.x=speed
twist.linear.y=0
twist.angular.z=0
else:
twist.linear.x=0
twist.linear.y=0
twist.angular.z=0
stline = False
t1=rospy.get_time()
cmd_pub.publish(twist)
r.sleep()
if __name__=='__main__':
rospy.init_node('Robot_moving', anonymous=True)
try:
move()
except rospy.ROSInterruptException: pass jgomezgadea
jgomezgadea Eswar1991
Eswar1991
We are trying to move the SUMMIT XL in a straight line in gazebo. The differential drive plugin for wheel joints is enabled and we gave a step input velocity to robot and observed the output response from \odom topic. There are sudden dips/ falls in the output responses for a small period of time. The output response and step input are shown below: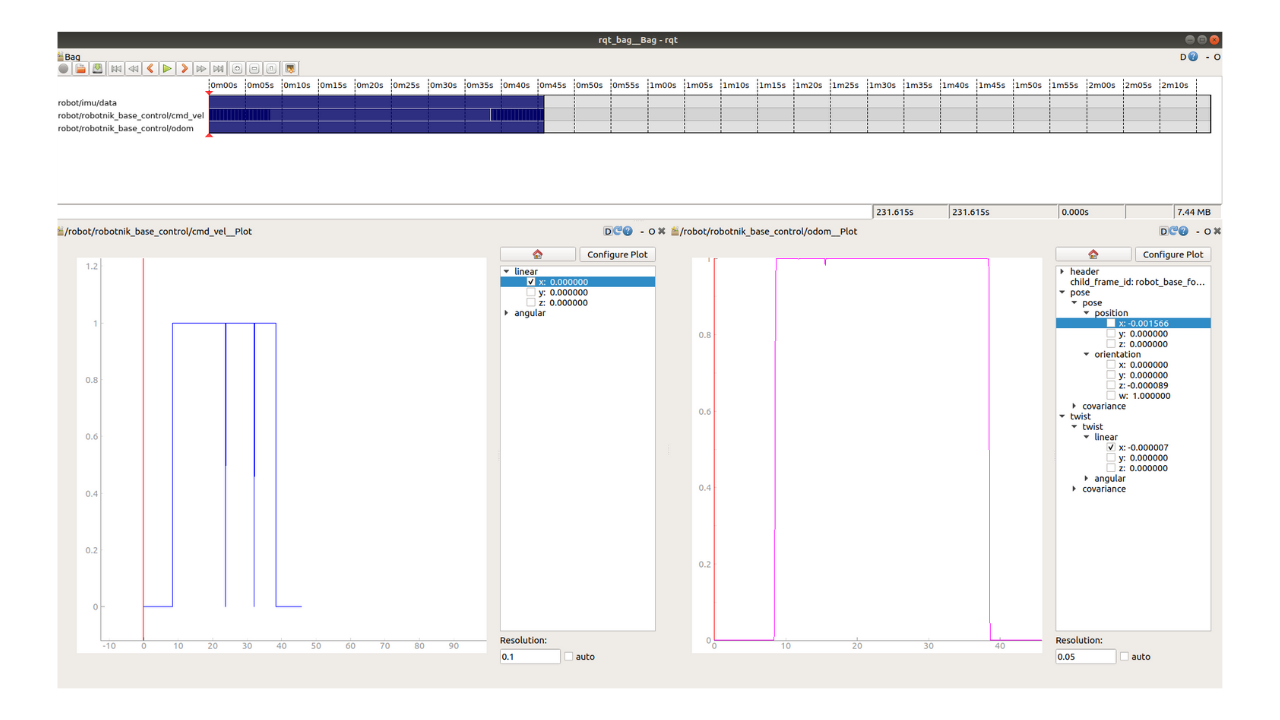 Ideally, both the input and outputs must match, as we do the robot motion in a ideal simulation environment. Can anyone clarify why this discrepancy pops up?
Ideally, both the input and outputs must match, as we do the robot motion in a ideal simulation environment. Can anyone clarify why this discrepancy pops up?