 puck-fzi
commented
3 years ago
puck-fzi
commented
3 years ago Hi,
please try to set the channel parameter to the respective channel [0,1].
Since this was functionality which was done initially but never tested since the microScan3 had no multiple channels at develop time this is not entirely tested. The channels internally will start with the index 0 on the ROS side, which is the default first channel. So setting it to 1 should change the setting. Please let me know if that works.
If yes I will integrate it into the documentation and in the dynamic reconfigure.
 tbohnma
tbohnma nguyendo1403
nguyendo1403
Hello,
the nanoScan offers 2 channels to provide measurement data to 2 targets.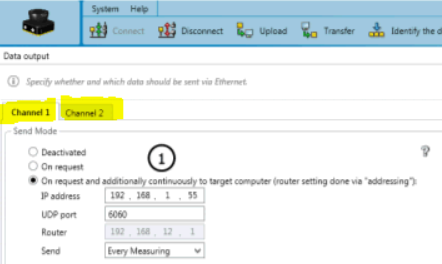
How can I configure this in the ROS driver? I only see the option to enable a channel with boolean, but which on will be adressed?