 MayaEnriquez
commented
1 year ago
MayaEnriquez
commented
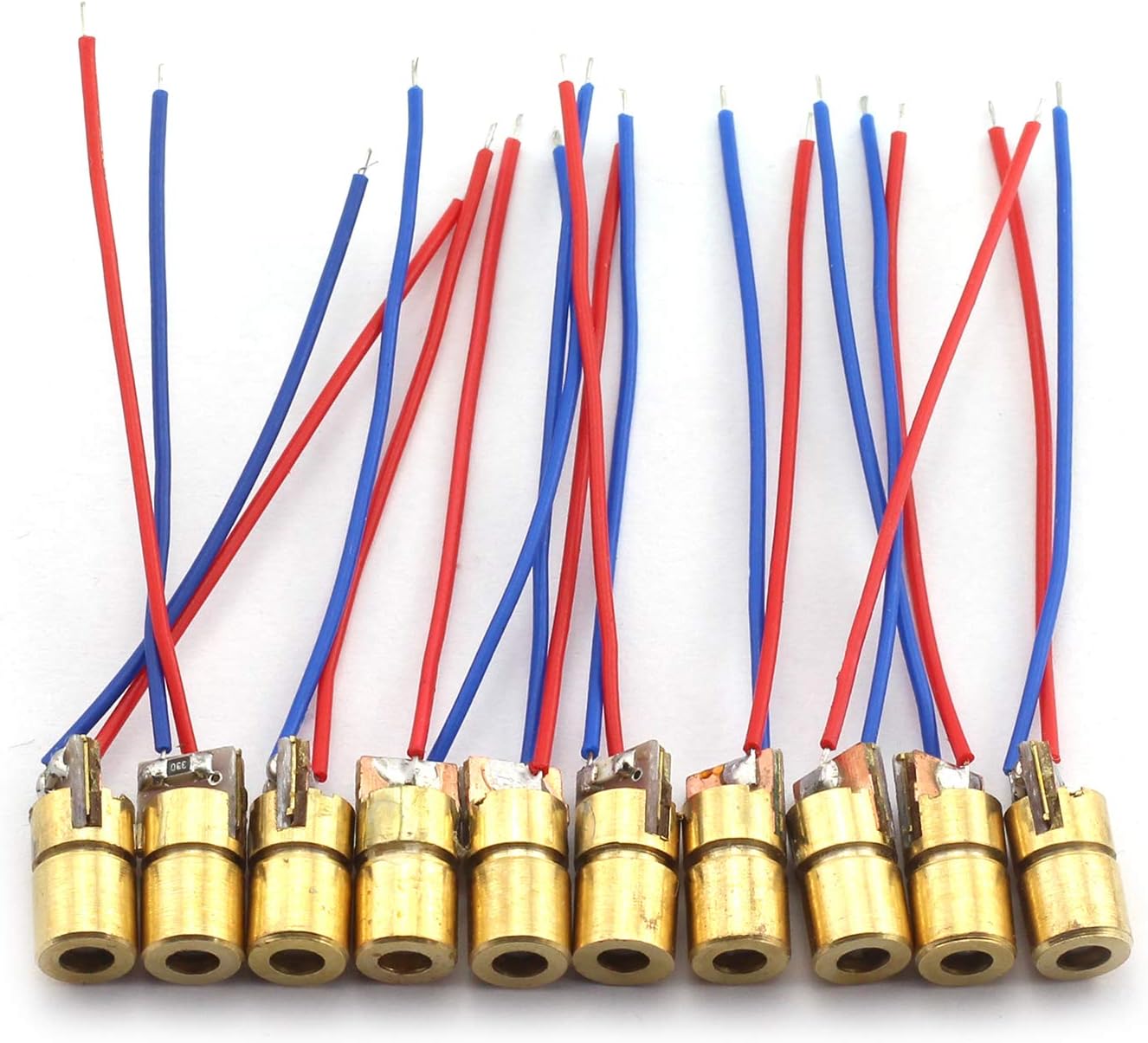
1 year ago Laser pointer : https://a.co/d/f2Ml6A3
Open MayaEnriquez opened 1 year ago
MayaEnriquez
commented
1 year ago Laser pointer : https://a.co/d/f2Ml6A3
 kate-oxley
commented
1 year ago
kate-oxley
commented
1 year ago Servo horn doesn’t fit Fix: instead of 3D printing, buy one that fits Joints are loose Fix: redesign claw joints to use bushings/shoulder bolts/bearings/something that screws into something other than plastic Doesn't include an accelerometer or laser pointer Add room & mounting for both Objects easily slip Fix: Add rubber for traction and adjust shape of claw Can't accomplish precision task Fix: Add something thin to the end that can press individual keys on a keyboard (can be removable)
Note: uses usb-c cable (can’t use a slip ring)
kate-oxley
commented
1 year ago kate-oxley
commented
1 year ago kate-oxley
commented
1 year ago Printed & tested a laser cut/3D printed prototype
 kammce
commented
1 year ago
kammce
commented
1 year ago Note that the accelerometer can be place on the wrist. Or if the differential wrist is used, you can put it on the feedback gear. The feedback gear is the gear on the back that looks like it doesn't do anything. The complexity of this design is that it needs a slip ring. Another option is what we did for the Rover Nessie (2nd rover) which was a board with a magnetic encoder (roll feedback) and accelerometer (pitch feedback) with a magnet on the feedback gear that can spin freely.
@kate-oxley
kate-oxley
commented
1 year ago @kammce got it, that's very good to know.
kate-oxley
commented
7 months ago I'm updating the 2024 end effector issue's opening comment to better reflect the new rules, so I'm putting the 2023 one here.
The end effector is a 4 bar claw mechanism that will move small items (e.g. wrenches, hammers, etc.), transport rocks (>5 kg), and maneuver small items (e.g. type on a keyboard, tighten an allen wrench, flip switches, etc.).
The most relevant sections of the rules are as follows:
1.c.iii. Objects to be retrieved in the field will consist of small lightweight hand tools (e.g. screwdriver, hammer, wrench), small instruments (actual or simulated, e.g. a small box), supply containers (e.g. toolbox, gasoline can), or rocks up to 5 kg in mass. All items except the rocks will have graspable features (such as a handle) no greater than 5 cm in diameter. The maximum dimensions shall be no larger than 40 cm x 40 cm x 40 cm, but teams should expect a variety of sizes and weights.
1.d.i. Rovers shall be required to perform several dexterous operations on a mock-up equipment system. The rover shall have to travel up to 0.25 km across relatively flat terrain to reach the equipment. Equipment will be between 1.5m height and the ground. The equipment servicing mission will involve delivering a cached science sample to a lander and performing maintenance on the lander. It will include the following sub- tasks which may be performed in any order: ● Pick up the cache container and transport to the lander rocket. Cache will have a handle at least 10 cm long and not more than 5 cm in diameter. Cache will weigh less than 5 kg. ● Open a drawer on the lander. Insert cache into a close-fitting space in the drawer, and close the drawer. ● Tighten captive screw to secure drawer. Screw will be a 5/16” Allen (hex) head. Teams may build the hex driver into the rover, or pick up the screwdriver provided. ● Undo a latch on a hinged panel of the lander and open panel. ● Type commands on a keyboard and follow directions on computer display. Typing must be correct for full points, but spelling mistakes or repeated letters may be corrected using the backspace/delete button or ignored for partial points. ● Operate a joystick (4-position, spring-return) to direct an antenna while observing a gauge. Gauge will be up to 20cm away from the joystick. ● Pick up and insert a rugged USB memory stick into a USB (type A) slot on the lander. ● Push buttons, flip switches, turn knobs.
To summarize, the end effector will interact with the following:
These are from the 2023 manual, but the guidelines shouldn't change much next year. This section will be updated when next year's manual is released
@starphys (mission controls) @klam20 (electronics)
Raspberry Pi Camera Board v1.3
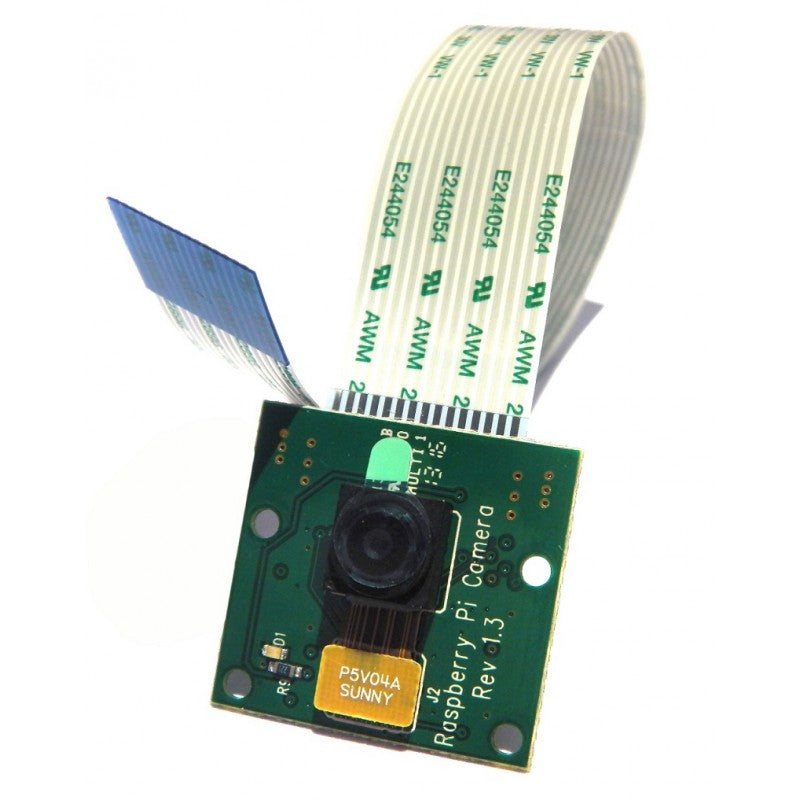

Camera module --> raspberry pi via ribbon cable Servo --> PCB board via PWM wires Laser diode --> PCB board via power wires PCB board --> battery (OFF CLAW) via USB-C cable
Access CAD here
Kate researched claws. Stuff that needs to go on it: Claw, Motor, Hand Pcb(Check Slip Ring vs USB C cable), Laser pointer, whatever gears/mechanism. The current design needs to be extended or redone to make more space. The expected Degree of freedom(Pitch & Yaw range) needs to be discussed/ changed based on how the hand PCB is cabled. This should be changed/finished on the 2023 rover, ideally before we start on the 2024 version so we can see what to change in the future.