 Fhy0720
commented
1 year ago
Fhy0720
commented
1 year ago @wjyustl , I encountered the same problem as you. I'm wondering if there is a multi-agent task here, although it seems to be mentioned in the paper, in the code I'm not sure.
Closed wjyustl closed 8 months ago
Fhy0720
commented
1 year ago @wjyustl , I encountered the same problem as you. I'm wondering if there is a multi-agent task here, although it seems to be mentioned in the paper, in the code I'm not sure.
 wjyustl
commented
1 year ago
wjyustl
commented
1 year ago I also encounter the following problems when the code was running:
Traceback (most recent call last):
File "/home/wjy/anaconda3/envs/MyLapGym/lib/python3.9/multiprocessing/process.py", line 315, in _bootstrap
self.run()
File "/home/wjy/anaconda3/envs/MyLapGym/lib/python3.9/multiprocessing/process.py", line 108, in run
self._target(*self._args, self._kwargs)
File "/home/wjy/anaconda3/envs/MyLapGym/lib/python3.9/site-packages/stable_baselines3/common/vec_env/subproc_vec_env.py", line 45, in _worker
observation, reset_info = env.reset(seed=data)
File "/home/wjy/anaconda3/envs/MyLapGym/lib/python3.9/site-packages/gymnasium/wrappers/time_limit.py", line 75, in reset
return self.env.reset(kwargs)
File "/home/wjy/MyLapGym/sofa_env/sofa_env/scenes/rope_threading/rope_threading_env.py", line 769, in reset
super().reset(seed)
File "/home/wjy/MyLapGym/sofa_env/sofa_env/base.py", line 208, in reset
self._init_sim()
File "/home/wjy/MyLapGym/sofa_env/sofa_env/scenes/rope_threading/rope_threading_env.py", line 299, in _init_sim
super()._init_sim()
File "/home/wjy/MyLapGym/sofa_env/sofa_env/base.py", line 282, in _init_sim
self.scene_creation_result = getattr(self._scene_description_module, "createScene")(self._sofa_root_node, **self.create_scene_kwargs)
File "/home/wjy/MyLapGym/sofa_env/sofa_env/scenes/rope_threading/scene_description.py", line 144, in createScene
Eye(
File "/home/wjy/MyLapGym/sofa_env/sofa_env/scenes/rope_threading/sofa_objects/eye.py", line 90, in init
self.center_node.addObject("RigidMapping", template="Rigid3,Rigid3", globalToLocalCoords=True)
ValueError: Object type RigidMapping<> was not created
The object is in the factory but cannot be created.
Requested template : Rigid3,Rigid3
Used template : None
Also tried to create the object with the template 'Rigid2d,Vec2d' but failed for the following reason(s):
 ScheiklP
commented
1 year ago
ScheiklP
commented
1 year ago Hi @wjyustl and @DISCORDzzz ,
wjyustl
commented
1 year ago @ScheiklP Thanks. My SOFA version is v23.06.
I change "render_mode" to HUMAN https://github.com/ScheiklP/sofa_zoo/blob/main/sofa_zoo/envs/rope_threading/ppo.py#L44 and comment out lines 138-140 of the code. https://github.com/ScheiklP/sofa_zoo/blob/main/sofa_zoo/envs/rope_threading/ppo.py#L138-140
In addition, I need to comment out https://github.com/ScheiklP/sofa_env/blob/main/sofa_env/scenes/rope_threading/sofa_objects/eye.py#L90 in eye.py.
The ppo.py in rope_threading can operate normally. Will it make a big difference?
ScheiklP
commented
10 months ago I am actually not sure. Have you noticed anything?
Hi, @ScheiklP Sorry disturbing you again. Some time ago the question of "successful_task" was resolved. I drew the following line diagram with wandb. Set "number_of_envs" to 8 and the results were repeated 5 times to take the average value.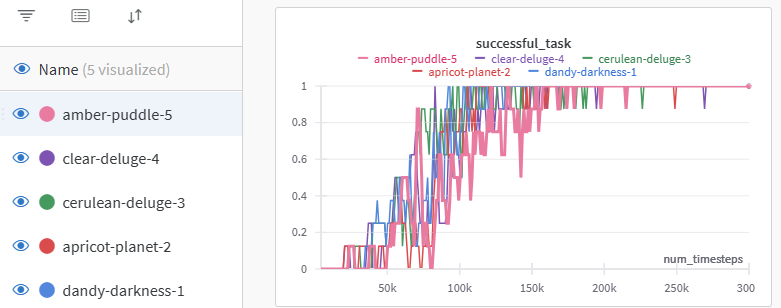

My latest question is about multi-agent environment. I want to test a multi-agent reinforcement learning algorithm that needs to use multi-agent environment. Taking "RopeThreading" for example, I found that two laparoscopic graspers could not do the action at the same time, that is, when one did the action, the other had to stop. Is the "RopeThreading" environment still a multi-agent environment? Is it reasonable if I want to train this environment with a multi-agent reinforcement learning algorithm (e.g. MAPPO) instead of a PPO?