 Danfoa
commented
6 years ago
Danfoa
commented
6 years ago Hey @Maik93, as far as I notice you have the error of renaming the connection joint between the camera and its parent link (this could be the cause of the issue, but I am not sure), so if you notice in the realsense-RS200.macro.xacro file, in the lines 41 to 46:
<!-- Connect camera to parent frame-->
<joint name="${prefix}realsense_joint" type="fixed">
<parent link="${parent}"/>
<child link="${prefix}rs200_camera"/>
<xacro:insert_block name="origin"/>
</joint>The macro function is coded in such a way that when you create an instance of the camera object you provide the sufficient parameters to create this joint, so If i take your file and turn it this way:
<?xml version="1.0"?>
<!--Develped by Daniel Ordonez 22.05.2018 - daniels.ordonez@gmail.com
INFORMATION:
This is an example of how to use the realsense-rs200 macro function.
-->
<robot name="robot_with_rs200" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- Import macro for realsense-RS200 camera-->
<xacro:include filename="$(find realsense_gazebo_plugin)/urdf/realsense-RS200.macro.xacro"/>
<!-- Create camera instance -->
<xacro:realsense-rs200 prefix="" parent="box"> <!-- Do not forget parameters-->
<origin rpy="0 0 0" xyz="0 0 0.2"/>
</xacro:realsense-rs200>
<!-- Gazebo world link required to position the robot with respect to origin-->
<link name="world"/>
<link name="box">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</visual>
</link>
<joint name="world_joint" type="fixed">
<parent link="world"/>
<child link="box"/>
<origin rpy="0 0 0" xyz="0 0 0.1"/>
</joint>
</robot>Then the urdf function is called appropriately, and as far as I notice the tree link is created properly and no axis collide, as you can see here:

(I use Rviz because is faster and both Rviz and Gazebo check the same robot_state topic.
PS: I will update the instructions of use of the macro function, I notice they could be a little deceiving, and please let me know if the problem was solved.
 Maik93
Maik93
Hi, I'm trying to figure out how to attach your rs200 to my robot's URDF: the problem is that while using your URDF structure ( (it can be seen by setting
(it can be seen by setting
rs200_simulation.xacro) everything is ok, each camera has its vertex in the correct position:<visualize>1</visualize>inrealsense-RS200.macro.xacro:151,173,195)However if I attach the camera to any other link that isn't called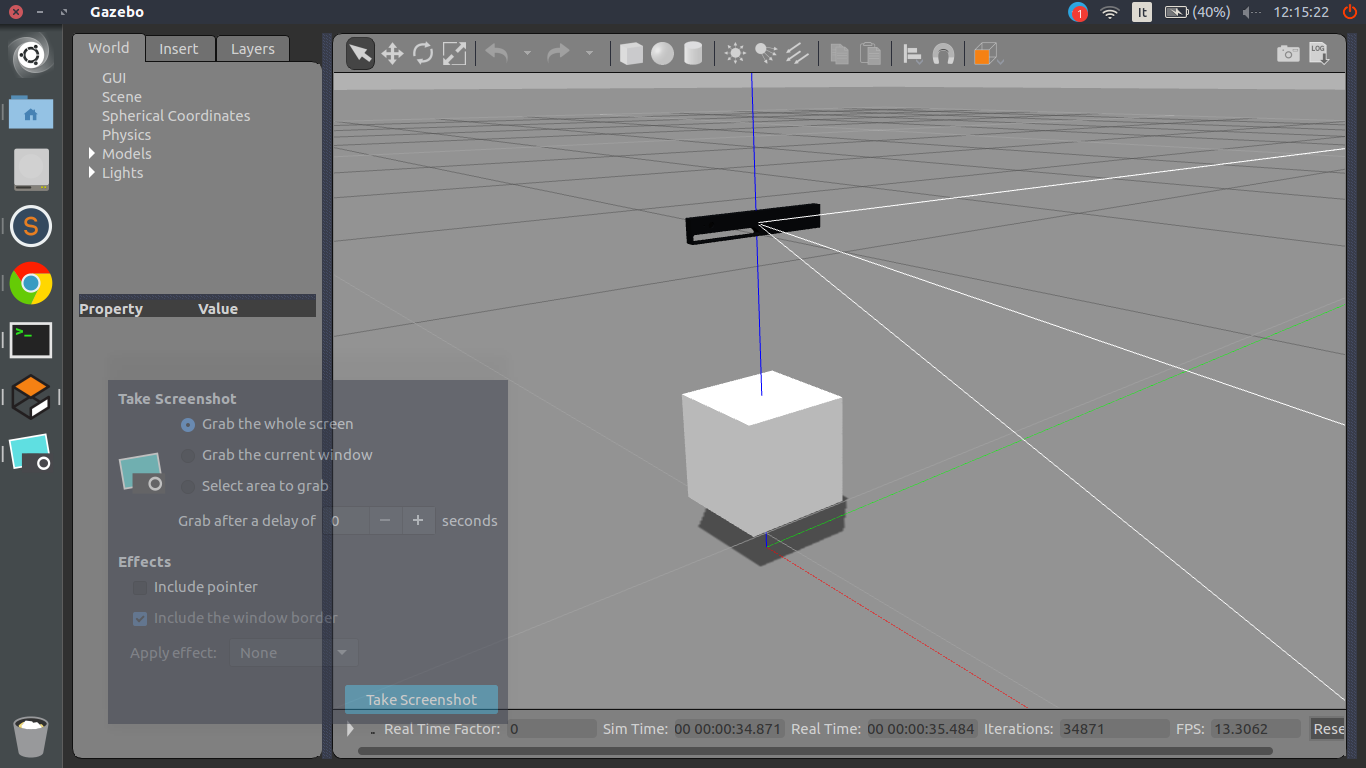
worldeach camera cone collapse in rs200 origin, as follows:This result can be reproduced using this simple URDF: