 SyrianSpock
commented
6 years ago
SyrianSpock
commented
6 years ago Hi @cyberguy42,
Your analysis is correct. Thanks a lot for the thorough investigation.
I have addressed this by computing the focal length (published over ROS) from the horizontal FOV (given by the Gazebo rendering object). So there is a single source of truth now: the horizontal FOV value set in URDF. Can you please try this branch?
 cyberguy42
cyberguy42



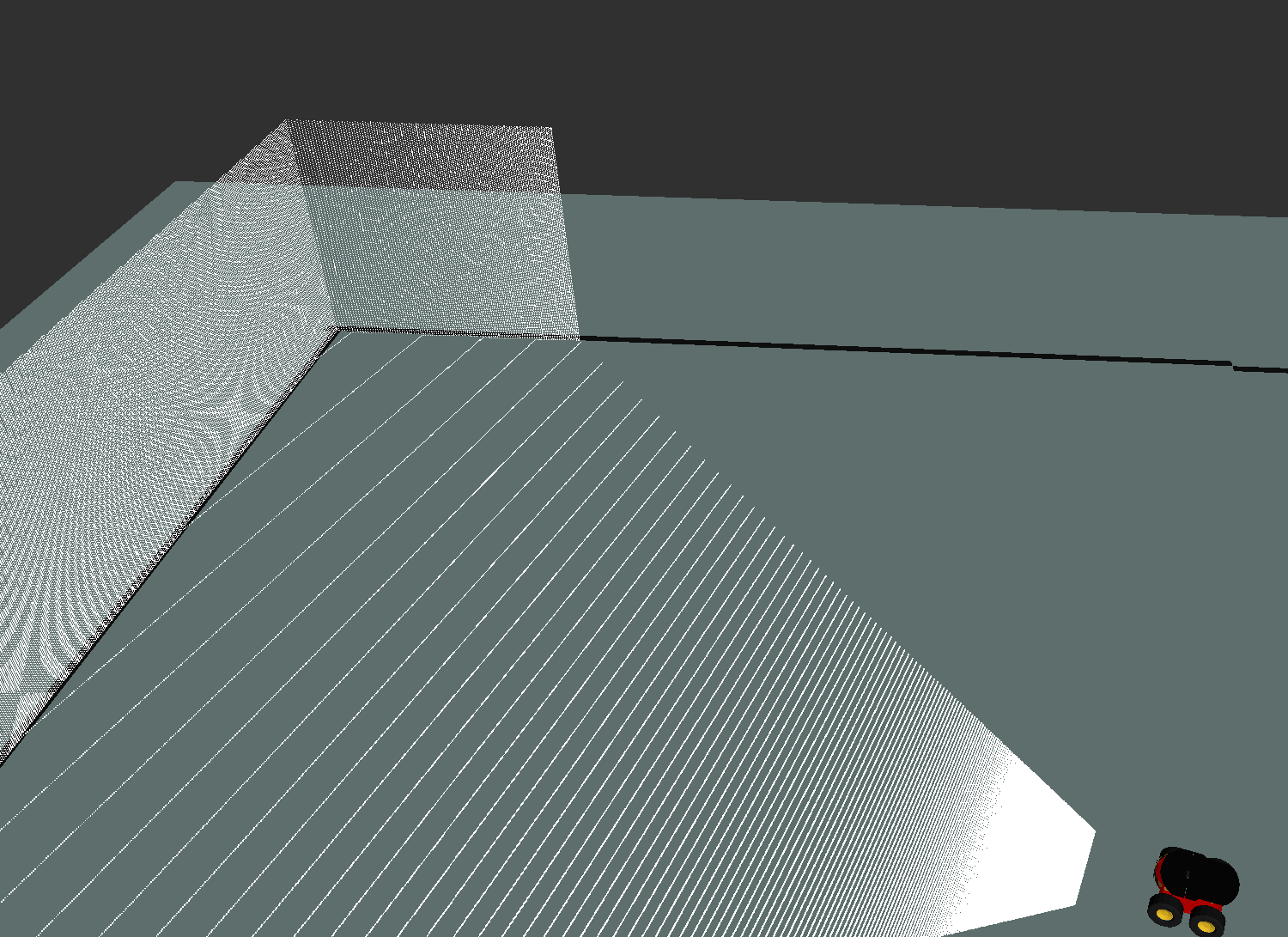
While driving a robot around in gazebo, I noticed that the pointcloud produced from the realsense depth image was incorrect:
The published static map accurately shows the location of walls in the world to within 1 cell, and some custom (and thoroughly tested) code publishes the necessary transforms such that the pose of the robot in the
mapframe exactly matches its pose in gazebo. In short, pointclouds should align with the lines on the map and the observed problem is not due to odometry errors. Based on this knowledge, and the fact that I have not seen these kinds of errors when running the exact same world with a Kinect on a Turtlebot, I concluded that the problem must be withinrealsense_gazebo_plugin. Additional configuration info: Gazebo 7; realsense_gazebo_plugin: 244629d536128a4bdcb968b7ce9555e3baae7b50I checked the source code and found where the focal length is defined (463.889) and calculated the corresponding horizontal fov:
2*arctan(640/(2*463.889)) = 1.208. However, the default value for horizontal_fov inurdf/realsense-RS200.macro.xacrois 1.047.I replaced 1.047 with 1.208 for all of the cameras and reloaded my simulation. The result:
Based on the above analysis, I feel reasonably confident in asserting that the provided values for the parameters are inconsistent and that at least one of them needs to be changed. Ideally,
focalwould be determined byhorizontal_fov, though I'm not certain how that would be done.