 alicewithalex
commented
3 years ago
alicewithalex
commented
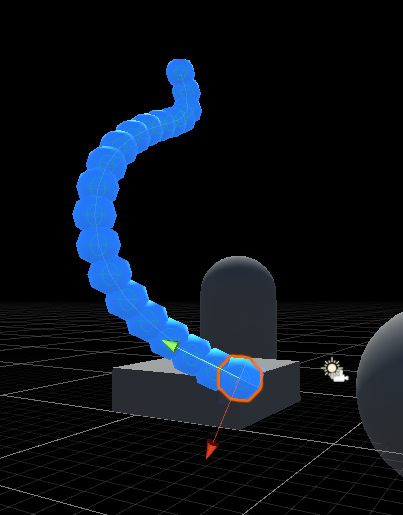
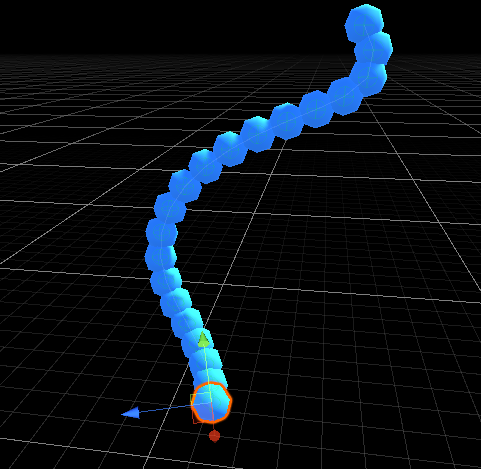
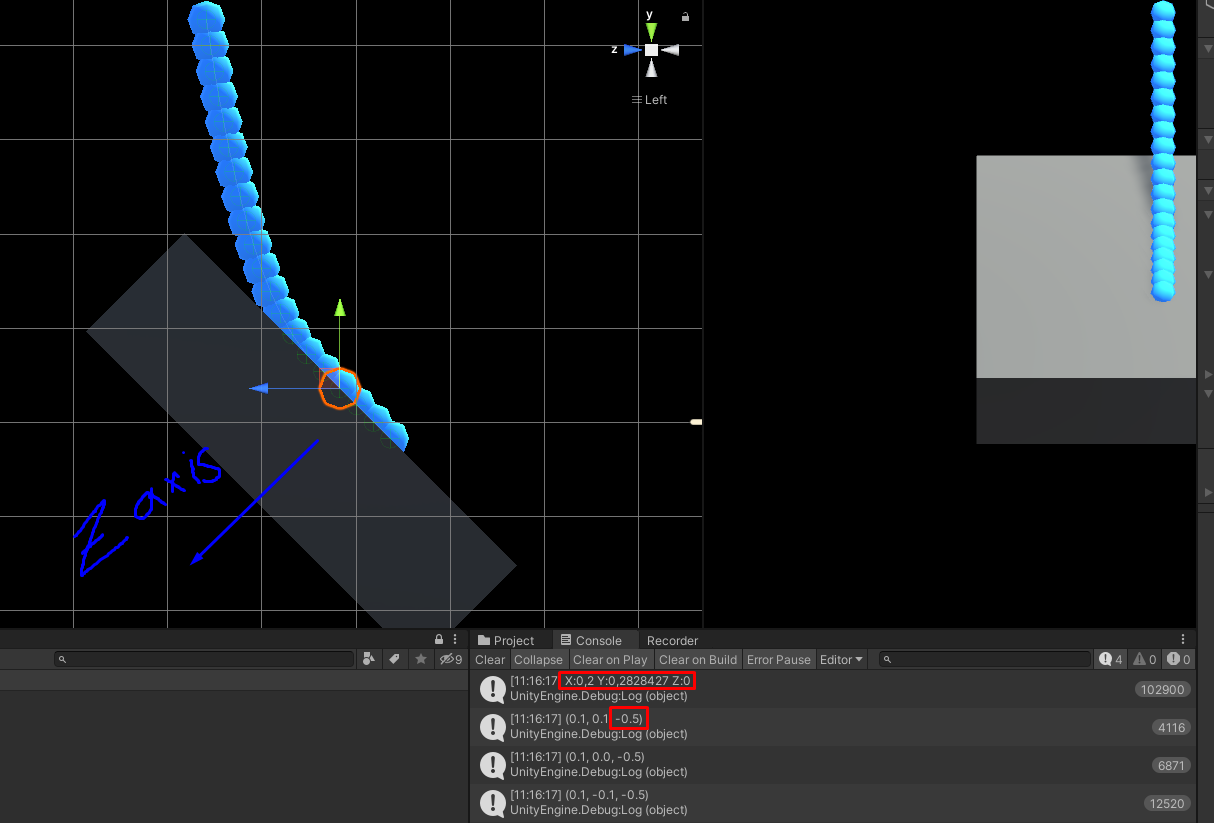
3 years ago Hello, I try to add each node has a radius. Now your code just push away particle don't take in account node radius, just it position. I implement this but have jittéring issue now and don't know how to solve it, can we communicate in any place, where I can send you code snippets of media examples of problem? Also I do in 3D :)
 Toqozz
Toqozz
 ljhan85
ljhan85 Befezdow
Befezdow

 aprius
aprius Tivium
Tivium TryBios
TryBios
Discuss the blog post here; share your thoughts, improvements, or any issues you run into so that others can find them.