AndyZe
commented
5 years ago
AndyZe
commented
5 years ago I just spent about an hour trying to re-create this. I think it's a bug with "auto" stamping of ROS messages. Joint jogging works fine if I use a joystick to send the commands. See here.
If you read through the github issue, they recommend adding -s for "substitution". I didn't try this.
As in that answer, I would recommend creating a Python executable to publish messages for testing.
 PorkPy
PorkPy telejesus2
telejesus2
I am trying to publish joint commands to a UR5 using jog_arm. Each command will be to move 6 joints by +/- 1 degree increments. First of all, I'm finding it difficult to find the correct syntax for publishing to this topic but I have been attempting to use: 'rostopic pub /jog_arm_server/joint_delta_jog_cmds jog_msgs/JogJoint -1 '{stamp: now, frame_id: base_link}' [wrist_3_joint] [10]' For which I get an output: 'publishing and latching message for 3.0 seconds' Echoing the topic gives: 'header: seq: 1 stamp: secs: 1550500372 nsecs: 132920026 frame_id: "base_link" joint_names: [wrist_3_joint] deltas: [10.0]'
So I'm getting an output and /jog_arm_server is connected to /move_group but the robot is not moving. Am I going about this the right way? I don't think sending discreet 1-degree commands to a UR5 should be this difficult. Many thanks.
Edit: if I change the header to: '{seq: auto, stamp: auto, frame_id: auto}' I get: [WARN] [1550506997.124494]: Inbound TCP/IP connection failed: 'Header' object has no attribute 'secs'
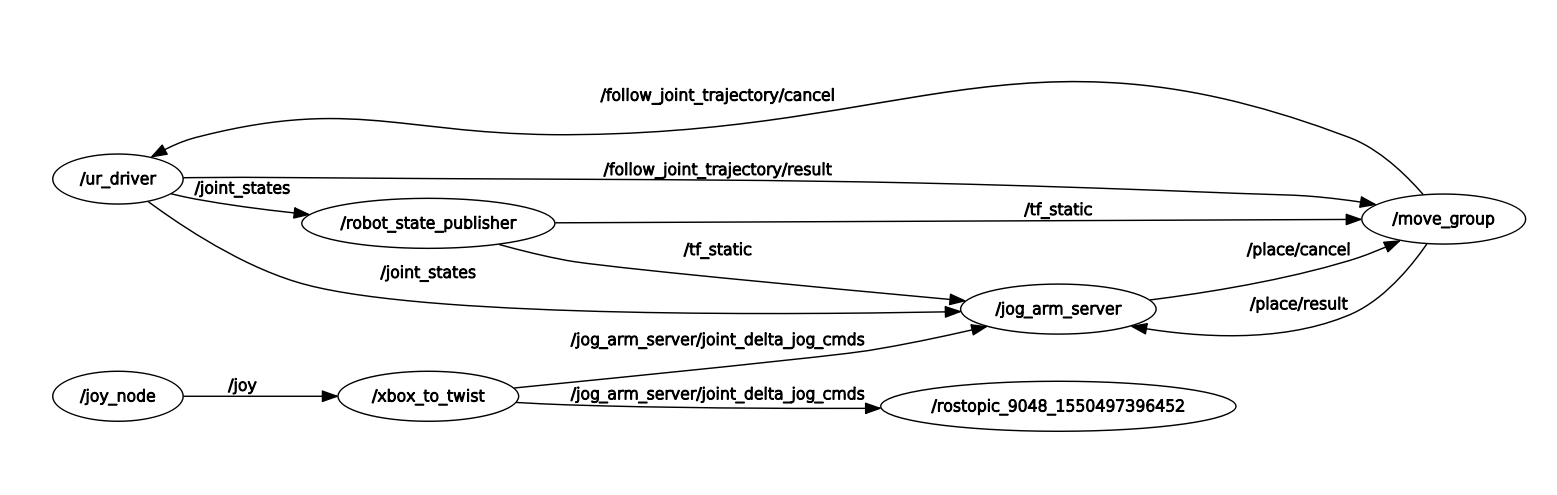
Here is my output from rqt_graph