a1600012888
commented
2 years ago
a1600012888
commented
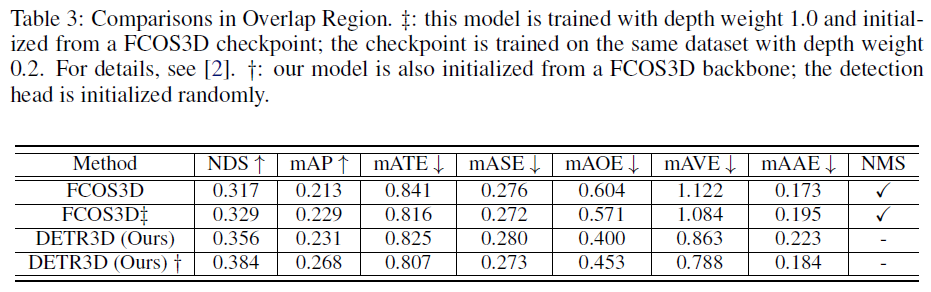
2 years ago To test in the overlap region, I suggest you modify the code of the official evluation code here: https://github.com/nutonomy/nuscenes-devkit/blob/master/python-sdk/nuscenes/eval/detection/evaluate.py#L98
You should add some code here to filter out boxes.
 quanh1990
quanh1990
The paper compares FCOS3D and Detr3D in the overlap region. How to test the nuscenes only in the overlap region?Thank you very much!