 Xinyu-Yi
commented
2 years ago
Xinyu-Yi
commented
2 years ago 不记得了。您可以直接和合成imu比较一下,如果差不多就是有calibration。您的问题都可以设计实验或者可视化验证
Open Jaceyxy opened 2 years ago
Xinyu-Yi
commented
2 years ago 不记得了。您可以直接和合成imu比较一下,如果差不多就是有calibration。您的问题都可以设计实验或者可视化验证
 Jaceyxy
commented
2 years ago
Jaceyxy
commented
2 years ago 十分感谢,我会尝试一下
 wwwpkol
commented
2 years ago
wwwpkol
commented
2 years ago 我自己也写了一个训练的脚本,咱们能交流一下?或者我加您个微信或邮箱
 Mumuwei
commented
2 years ago
Mumuwei
commented
2 years ago @wwwpkol 我能和你也交流一下吗?
 YaoBeiji
commented
1 year ago
YaoBeiji
commented
1 year ago 十分感谢,我会尝试一下
你好,能否咨询下transpose 训练dip-imu的详细过程?
wwwpkol
commented
1 year ago 否咨询下transpose 训练di
你邮箱多少,我发你邮箱吧
YaoBeiji
commented
1 year ago 否咨询下transpose 训练di
你邮箱多少,我发你邮箱吧
yaobeiji123@163.com,非常感谢
wwwpkol
commented
1 year ago 我并没有达到文章的效果,我把真值的计算和训练发你了。
for epoch in range(1000):
totall_los = 0 for x, y, j, s in tqdm.tqdm(list(zip(xs, ys, joint, shape))): leaf_joint_position, full_joint_position, global_reduced_pose, \ contact_probability, velocity, rnn_state = net(x)
# FK # y_pose, y_tran = P.forward_kinematics(pose = y[0], shape = s[0],tran= y[1]) #y_pose roatation # l1-los y_1 = pose_s1_normalize(j, y[0]).reshape(-1, 15) # l2-los y_2 = pose_s2_normalize(j, y[0]).reshape(-1, 69) # l3-los y_pose_3 = pose_s3_normalize(y[0]) y_3 = y_pose_3.view(-1, 3, 3)[:, :, :2].transpose(1, 2).clone().reshape(-1, 90) # B1-los y_4 = AMASS_foot_GT(j) # B2-los y_5 = AMASS_root_GT(y[0], y[1])
vel_3, y_5_3 = root_vel(velocity, y_5, 3) vel_9, y_5_9 = root_vel(velocity, y_5, 9) vel_27, y_5_27 = root_vel(velocity, y_5, 27)
net.zero_grad() loss_1 = criterion_mse(leaf_joint_position, y_1.to(device)) loss_2 = criterion_mse(full_joint_position, y_2.to(device)) loss_3 = criterion_mse(global_reduced_pose, y_3.to(device)) loss_4 = criterion_cro(contact_probability, y_4.to(device)) loss_5 = criterion_mse(velocity, y_5.to(device)) + criterion_mse(vel_3, y_5_3.to(device)) + criterion_mse(vel_9, y_5_9.to(device)) + \ criterion_mse(vel_27, y_5_27.to(device)) loss = loss_1 + loss_2 + loss_3 + loss_4 + loss_5 # loss = loss_3 totall_los = totall_los + loss
optimizer.zero_grad() loss.backward() optimizer.step()
print("total_los",loss,"count:",count)
# if iter%100 ==0: # print("loss".format(iter, loss.item))
count = count + 1 if count%2 == 0: torch.save(net, f"TransPose_tt/sa_1013_as_al/transpose{count}_{totall_los}.pth")
------------------ 原始邮件 ------------------ 发件人: "Xinyu-Yi/TransPose" @.>; 发送时间: 2022年12月20日(星期二) 下午4:16 @.>; 抄送: "SeaofBitternes @.**@.>; 主题: Re: [Xinyu-Yi/TransPose] 使用DIP-IMU训练 (Issue #38)
否咨询下transpose 训练di
你邮箱多少,我发你邮箱吧
@.***,非常感谢
— Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.***>
YaoBeiji
commented
1 year ago 我并没有达到文章的效果,我把真值的计算和训练发你了。 #train.py for epoch in range(1000): totall_los = 0 for x, y, j, s in tqdm.tqdm(list(zip(xs, ys, joint, shape))): leaf_joint_position, full_joint_position, global_reduced_pose, \ contact_probability, velocity, rnn_state = net(x) # FK # y_pose, y_tran = P.forward_kinematics(pose = y[0], shape = s[0],tran= y[1]) #y_pose roatation # l1-los y_1 = pose_s1_normalize(j, y[0]).reshape(-1, 15) # l2-los y_2 = pose_s2_normalize(j, y[0]).reshape(-1, 69) # l3-los y_pose_3 = pose_s3_normalize(y[0]) y_3 = y_pose_3.view(-1, 3, 3)[:, :, :2].transpose(1, 2).clone().reshape(-1, 90) # B1-los y_4 = AMASS_foot_GT(j) # B2-los y_5 = AMASS_root_GT(y[0], y[1]) vel_3, y_5_3 = root_vel(velocity, y_5, 3) vel_9, y_5_9 = root_vel(velocity, y_5, 9) vel_27, y_5_27 = root_vel(velocity, y_5, 27) net.zero_grad() loss_1 = criterion_mse(leaf_joint_position, y_1.to(device)) loss_2 = criterion_mse(full_joint_position, y_2.to(device)) loss_3 = criterion_mse(global_reduced_pose, y_3.to(device)) loss_4 = criterion_cro(contact_probability, y_4.to(device)) loss_5 = criterion_mse(velocity, y_5.to(device)) + criterion_mse(vel_3, y_5_3.to(device)) + criterion_mse(vel_9, y_5_9.to(device)) + \ criterion_mse(vel_27, y_5_27.to(device)) loss = loss_1 + loss_2 + loss_3 + loss_4 + loss_5 # loss = loss_3 totall_los = totall_los + loss optimizer.zero_grad() loss.backward() optimizer.step() print("total_los",loss,"count:",count) # if iter%100 ==0: # print("loss".format(iter, loss.item)) count = count + 1 if count%2 == 0: torch.save(net, f"TransPose_tt/sa_1013_as_al/transpose{count}_{totall_los}.pth") … ------------------ 原始邮件 ------------------ 发件人: "Xinyu-Yi/TransPose" @.>; 发送时间: 2022年12月20日(星期二) 下午4:16 @.>; 抄送: "SeaofBitternes @.**@.>; 主题: Re: [Xinyu-Yi/TransPose] 使用DIP-IMU训练 (Issue #38) 否咨询下transpose 训练di 你邮箱多少,我发你邮箱吧 @.,非常感谢 — Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.> 可以提供dataset的细节嘛?我打算每个模块训练下。
wwwpkol
commented
1 year ago 并没有什么细节,我只是把所有的点 转化为世界坐标系。
------------------ 原始邮件 ------------------ 发件人: @.>; 发送时间: 2022年12月20日(星期二) 下午5:24 收件人: @.>; 抄送: "SeaofBitternes @.>; @.>; 主题: Re: [Xinyu-Yi/TransPose] 使用DIP-IMU训练 (Issue #38)
我并没有达到文章的效果,我把真值的计算和训练发你了。 #train.py for epoch in range(1000): totall_los = 0 for x, y, j, s in tqdm.tqdm(list(zip(xs, ys, joint, shape))): leaf_joint_position, full_joint_position, global_reduced_pose, \ contact_probability, velocity, rnn_state = net(x) # FK # y_pose, y_tran = P.forward_kinematics(pose = y[0], shape = s[0],tran= y[1]) #y_pose roatation # l1-los y_1 = pose_s1_normalize(j, y[0]).reshape(-1, 15) # l2-los y_2 = pose_s2_normalize(j, y[0]).reshape(-1, 69) # l3-los y_pose_3 = pose_s3_normalize(y[0]) y_3 = y_pose_3.view(-1, 3, 3)[:, :, :2].transpose(1, 2).clone().reshape(-1, 90) # B1-los y_4 = AMASS_foot_GT(j) # B2-los y_5 = AMASS_root_GT(y[0], y[1]) vel_3, y_5_3 = root_vel(velocity, y_5, 3) vel_9, y_5_9 = root_vel(velocity, y_5, 9) vel_27, y_5_27 = root_vel(velocity, y_5, 27) net.zero_grad() loss_1 = criterion_mse(leaf_joint_position, y_1.to(device)) loss_2 = criterion_mse(full_joint_position, y_2.to(device)) loss_3 = criterion_mse(global_reduced_pose, y_3.to(device)) loss_4 = criterion_cro(contact_probability, y_4.to(device)) loss_5 = criterion_mse(velocity, y_5.to(device)) + criterion_mse(vel_3, y_5_3.to(device)) + criterion_mse(vel_9, y_5_9.to(device)) + \ criterion_mse(vel_27, y_5_27.to(device)) loss = loss_1 + loss_2 + loss_3 + loss_4 + loss_5 # loss = loss_3 totall_los = totall_los + loss optimizer.zero_grad() loss.backward() optimizer.step() print("total_los",loss,"count:",count) # if iter%100 ==0: # print("loss".format(iter, loss.item)) count = count + 1 if count%2 == 0: torch.save(net, f"TransPose_tt/sa_1013_as_al/transpose{count}_{totall_los}.pth") … ------------------ 原始邮件 ------------------ 发件人: "Xinyu-Yi/TransPose" @.>; 发送时间: 2022年12月20日(星期二) 下午4:16 @.>; 抄送: "SeaofBitternes @.@.>; 主题: Re: [Xinyu-Yi/TransPose] 使用DIP-IMU训练 (Issue #38) 否咨询下transpose 训练di 你邮箱多少,我发你邮箱吧 @.,非常感谢 — Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.> 可以提供dataset的细节嘛?我打算每个模块训练下。
— Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.***>
YaoBeiji
commented
1 year ago 并没有什么细节,我只是把所有的点 转化为世界坐标系。 … ------------------ 原始邮件 ------------------ 发件人: @.>; 发送时间: 2022年12月20日(星期二) 下午5:24 收件人: @.>; 抄送: "SeaofBitternes @.>; @.>; 主题: Re: [Xinyu-Yi/TransPose] 使用DIP-IMU训练 (Issue #38) 我并没有达到文章的效果,我把真值的计算和训练发你了。 #train.py for epoch in range(1000): totall_los = 0 for x, y, j, s in tqdm.tqdm(list(zip(xs, ys, joint, shape))): leaf_joint_position, full_joint_position, global_reduced_pose, \ contact_probability, velocity, rnn_state = net(x) # FK # y_pose, y_tran = P.forward_kinematics(pose = y[0], shape = s[0],tran= y[1]) #y_pose roatation # l1-los y_1 = pose_s1_normalize(j, y[0]).reshape(-1, 15) # l2-los y_2 = pose_s2_normalize(j, y[0]).reshape(-1, 69) # l3-los y_pose_3 = pose_s3_normalize(y[0]) y_3 = y_pose_3.view(-1, 3, 3)[:, :, :2].transpose(1, 2).clone().reshape(-1, 90) # B1-los y_4 = AMASS_foot_GT(j) # B2-los y_5 = AMASS_root_GT(y[0], y[1]) vel_3, y_5_3 = root_vel(velocity, y_5, 3) vel_9, y_5_9 = root_vel(velocity, y_5, 9) vel_27, y_5_27 = root_vel(velocity, y_5, 27) net.zero_grad() loss_1 = criterion_mse(leaf_joint_position, y_1.to(device)) loss_2 = criterion_mse(full_joint_position, y_2.to(device)) loss_3 = criterion_mse(global_reduced_pose, y_3.to(device)) loss_4 = criterion_cro(contact_probability, y_4.to(device)) loss_5 = criterion_mse(velocity, y_5.to(device)) + criterion_mse(vel_3, y_5_3.to(device)) + criterion_mse(vel_9, y_5_9.to(device)) + \ criterion_mse(vel_27, y_5_27.to(device)) loss = loss_1 + loss_2 + loss_3 + loss_4 + loss_5 # loss = loss_3 totall_los = totall_los + loss optimizer.zero_grad() loss.backward() optimizer.step() print("total_los",loss,"count:",count) # if iter%100 ==0: # print("loss".format(iter, loss.item)) count = count + 1 if count%2 == 0: torch.save(net, f"TransPose_tt/sa_1013_as_al/transpose{count}_{totall_los}.pth") … ------------------ 原始邮件 ------------------ 发件人: "Xinyu-Yi/TransPose" @.>; 发送时间: 2022年12月20日(星期二) 下午4:16 @.>; 抄送: "SeaofBitternes @.@.>; 主题: Re: [Xinyu-Yi/TransPose] 使用DIP-IMU训练 (Issue #38) 否咨询下transpose 训练di 你邮箱多少,我发你邮箱吧 @.,非常感谢 — Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.> 可以提供dataset的细节嘛?我打算每个模块训练下。 — Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.***>
我知道,但是dip-imu里面没有joint和shape的信息,这些是从哪里得到的,直接从amass里面拿么
Jaceyxy
commented
1 year ago @YaoBeiji 您好,请问您能也给我发一份嘛,我的邮箱是2535287050@qq.com,十分感谢,我一直没有办法达到文章的效果,且相差很远
 JaggerZr
commented
1 year ago
JaggerZr
commented
1 year ago 十分感谢,我会尝试一下
我在用amss数据集生成,train.pt和val.pt,发现sequence挺长的,有的序列长度有1900多,您train的时候有切成块吗?比如将1900切片成3个500的,剩下的400丢掉。
JaggerZr
commented
1 year ago 麻烦问下,您的train的代码有开源的计划吗,train的过程中,是分模块进行训练的,还是端到端训练的。训练过程中,有对比较长的序列进行切块吗,比如序列长度为1900,您有切成25xn的块吗,谢谢。
 iamyouno
commented
1 year ago
iamyouno
commented
1 year ago I also wrote a training script myself, can we share it? Or I will add your WeChat or email
@wwwpkol Can I also get training code? I tried it myself, and it looks like well.. But I could not complete calibration and normalize part. I saw your train.py but can't know info about pose_s1_normalize, pose_s2_normalize, AMASS_foot_GT ... because that functions are not in train.py.
My email is 117jyh@gmail.com, thank you very much.
YaoBeiji
commented
1 year ago I also wrote a training script myself, can we share it? Or I will add your WeChat or email
@wwwpkol Can I also get training code? I tried it myself, and it looks like well.. But I could not complete calibration and normalize part. I saw your train.py but can't know info about pose_s1_normalize, pose_s2_normalize, AMASS_foot_GT ... because that functions are not in train.py.
My email is 117jyh@gmail.com, thank you very much.
there is no more. That response was all.
 MeiYouN
commented
11 months ago
MeiYouN
commented
11 months ago 否咨询下transpose 训练di
你邮箱多少,我发你邮箱吧
你好,我的邮箱是2719141980@qq.com 可以发我一份吗。谢谢
Xinyu-Yi
commented
7 months ago 序列长度是300,需要把AMSS数据集切成小片段 The sequence length is 300. You need to split AMASS into small sequences.
 bryanbocao
commented
1 month ago
bryanbocao
commented
1 month ago 您好,很抱歉打扰您,我使用prepross.py处理dip_imu数据集,生成train.pt,test.pt,以前八个受试者作为训练集,后两个作为测试集进行训练,代码如下
我想知道train.pt 与test.pt的传感器数据是否经过论文中Calibration 此外pose_t是否为全局坐标系下的数据 很感谢您的解答
@Jaceyxy 这代码看起来是每iterate一个sample就update (backward() & step()) net耶。可能你想aggregate一个epoch的 losses再update一次net? 或者手写batch-level的update code。
 modadundun
commented
1 week ago
modadundun
commented
1 week ago 我自己也写了一个训练的脚本,咱们能交流一下?或者我加您个微信或邮箱
你好,可以发我一份训练代码吗,十分感谢,我的邮箱为:986718880@qq.com
bryanbocao
commented
1 week ago 我自己也写了一个训练的脚本,咱们能交流一下?或者我加您个微信或邮箱
@wwwpkol 您好,我的邮箱为: boccao@cs.stonybrook.edu,希望可以咨询下训练代码的问题。谢谢!
您好,很抱歉打扰您,我使用prepross.py处理dip_imu数据集,生成train.pt,test.pt,以前八个受试者作为训练集,后两个作为测试集进行训练,代码如下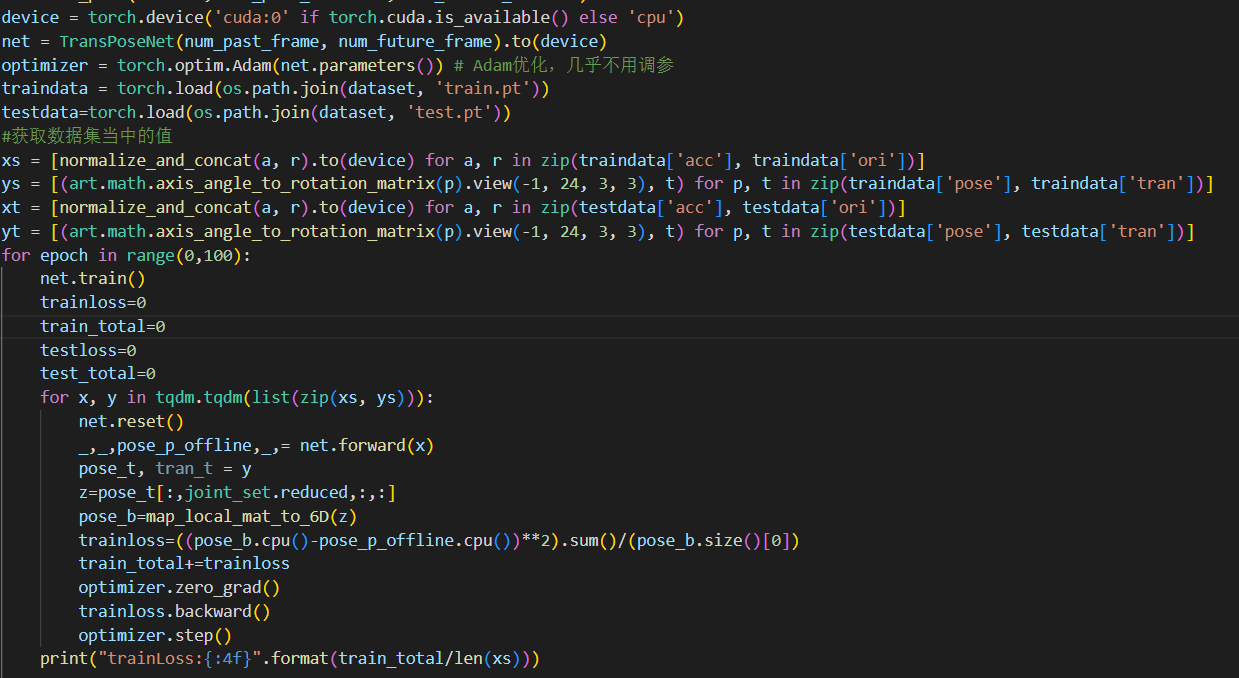 我想知道train.pt 与test.pt的传感器数据是否经过论文中Calibration
此外pose_t是否为全局坐标系下的数据
很感谢您的解答
我想知道train.pt 与test.pt的传感器数据是否经过论文中Calibration
此外pose_t是否为全局坐标系下的数据
很感谢您的解答