bigsuperZZZX
commented
2 years ago
bigsuperZZZX
commented
2 years ago This repository is ego-planner not Fast planner where this problem is encountered. Maybe try ego-planner and check if this delay happens and if it still exists, then rasie the issue again.
 bhaskar-glitch
bhaskar-glitch FPSychotic
FPSychotic EhrazImam
EhrazImam
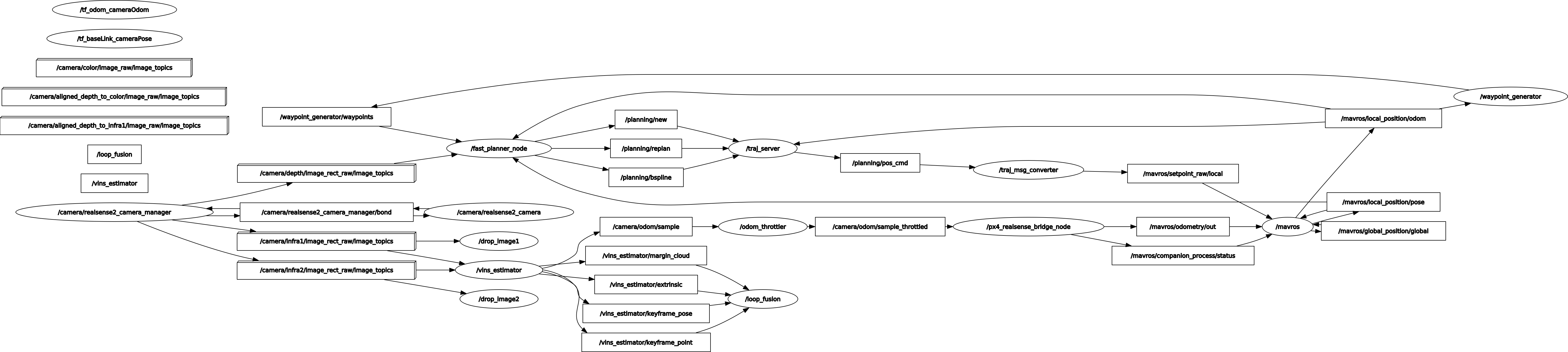
Hi, I'm using the depth image from Realsense d435i camera for the point cloud(/camera/depth/img_rect_raw) in Fast planner but the point cloud is having a huge delay of 5-6 seconds,it's a big delay for drones and it may crash.Is this a problem of fast planner(converting depth to pcl) or rviz(publish rate)? PLease help regarding the issue The Point cloud is like this rqt graph
rqt graph