 franferraz98
commented
3 years ago
franferraz98
commented
3 years ago The rest of the code, for if it's needed:
import logging
import math
import random
from pathlib import Path
import random
import numpy as np
import bpy
import zpy
from mathutils.bvhtree import BVHTree
log = logging.getLogger("zpy")
def rotation_matrix(axis, theta):
"""
Return the rotation matrix associated with counterclockwise rotation about
the given axis by theta radians.
"""
axis = np.asarray(axis)
axis = axis / math.sqrt(np.dot(axis, axis))
a = math.cos(theta / 2.0)
b, c, d = -axis * math.sin(theta / 2.0)
aa, bb, cc, dd = a * a, b * b, c * c, d * d
bc, ad, ac, ab, bd, cd = b * c, a * d, a * c, a * b, b * d, c * d
return np.array([[aa + bb - cc - dd, 2 * (bc + ad), 2 * (bd - ac)],
[2 * (bc - ad), aa + cc - bb - dd, 2 * (cd + ab)],
[2 * (bd + ac), 2 * (cd - ab), aa + dd - bb - cc]])
def rotate(point, angle_degrees, axis=(0,1,0)):
theta_degrees = angle_degrees
theta_radians = math.radians(theta_degrees)
rotated_point = np.dot(rotation_matrix(axis, theta_radians), point)
return rotated_point hu-po
hu-po





I've created this Blender scene where I have a dice, and I'm using ZPY to generate a dataset composed of images obtained by rotating around the object and jittering both the dice position and the camera. Everything seems to be working properly, but the bounding-boxes generated on the annotation file get progressively worse with each picture.
For example this is the first image's bounding-box: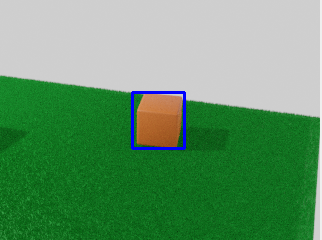
This one we get halfway through: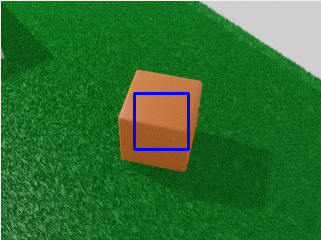
And this is one of the last ones: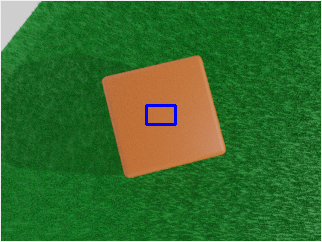
This is my code (I've cut some stuff, I can't paste it all for some reason):
Is this my fault or an actual bug?