 duduzai2019
commented
1 year ago
duduzai2019
commented
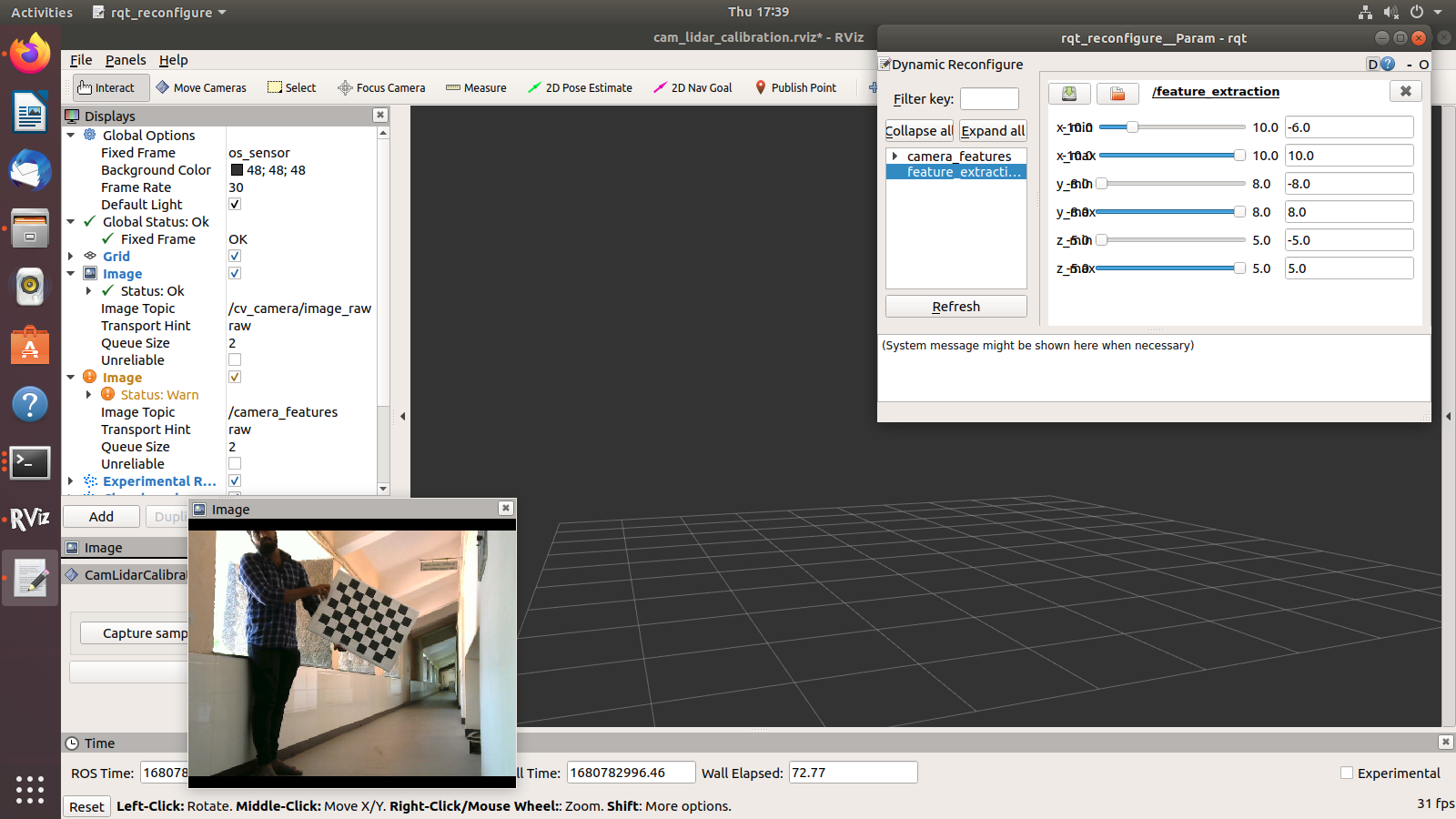
1 year ago I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data. I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_rawand
Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.
Can someone please tell me what all changes should i make for my code to work properly? Thanks in advance hi, friend, you can change the src/cam_lidar_calibration/cfg/params.yaml topic ,for example, # camera_topic: "/gmsl/A0/image_color" to lidar_topic: "/rslidar_points"(this is my lidar topic)

 [feature_extraction-1] process has died [pid 93910, exit code -6, cmd /home/duduzai/SPbot/itsc_calib_ws/devel/lib/cam_lidar_calibration/feature_extraction_node __name:=feature_extraction __log:=/home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1.log].
log file: /home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1*.log
[feature_extraction-1] process has died [pid 93910, exit code -6, cmd /home/duduzai/SPbot/itsc_calib_ws/devel/lib/cam_lidar_calibration/feature_extraction_node __name:=feature_extraction __log:=/home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1.log].
log file: /home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1*.log Haishanliu
Haishanliu juliangaal
juliangaal jclinton830
jclinton830 HaogeZhou
HaogeZhou
I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data. I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_rawand
Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.Can someone please tell me what all changes should i make for my code to work properly? Thanks in advance