jerryneedell
commented
4 years ago
jerryneedell
commented
4 years ago In the arduino code -- it is just toggled https://github.com/adafruit/RadioHead/blob/master/examples/feather/Feather9x_TX/Feather9x_TX.ino#L90
Tony DiCola did the intial CP lib and did it that way -- I recall some discussion like "don't mess with it" ;-)
edited to add -- but looking at "blame" in the CP library -- it looks like I added the PULLUP. I think you can just toggle it as an output.
 caternuson
caternuson brentru
brentru
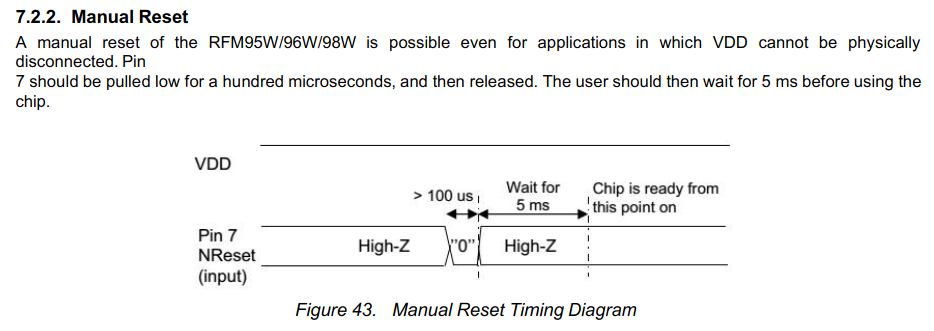
Is enabling internal pull up required for the reset pin? Or is simply setting to input adequate? Use case is for a board that lacks internal pull ups on inputs pins.