 ahundt
commented
5 years ago
ahundt
commented
5 years ago I think you might be able to simply manually add the files by creating a fresh project and copy them in. I'm traveling at the moment so I might not be able to respond immediately.
On Wed, Nov 21, 2018 at 10:42 AM Kamil Cetin notifications@github.com wrote:
I have some problem on importing grl project on Sunrise Workbench. I followed the instructions of Kuka LBR iiwa Java Setup at https://ahundt.github.io/grl/howto/iiwaKukaRobotSetup.html
I got stuck with the step of Setup Java Driver Software. I copy the folders in ${GRL_DIR}/src/java/grl/ from Ubuntu 16.04, then try to import the grl project with the Sunrise Workbench. However, when I select the grl folder from File > Import > General > Existing Projects into Sunrise Workspace GUI, the project does not seem on the list and it is not possible to Finish as shown below. [image: screenshot_grl_import] https://user-images.githubusercontent.com/44842167/48834660-3cfdf400-ed76-11e8-9dab-ad808e981c5d.png
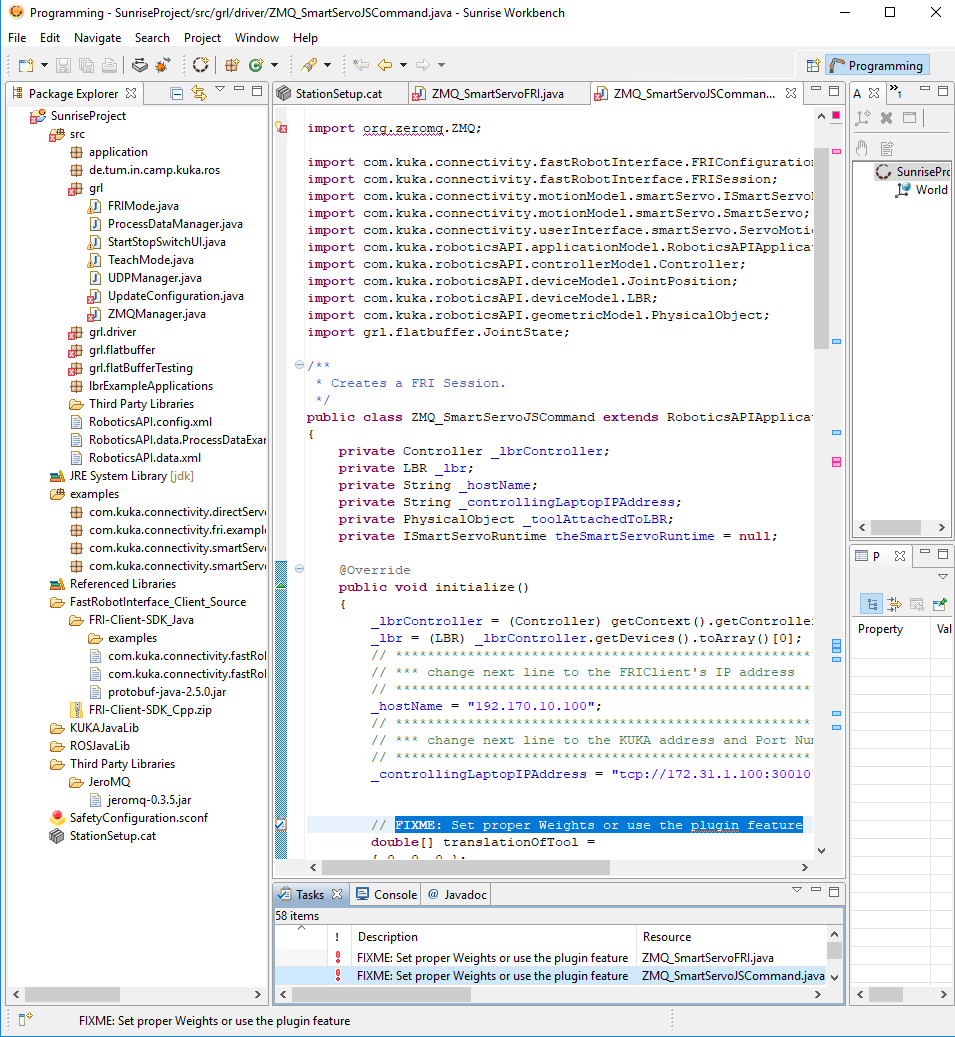
On the other side, when I import the grl project from File > Import > General > File System, it is loaded on the Sunrise Project. In this case, it is not possible to install the SunriseProject with imported files of grl onto the Kuka Controller due to the errors on the grl, grl.driver, grl.flatbuffer, grl.flatBufferTesting as shown below. [image: screenshot_grl_error] https://user-images.githubusercontent.com/44842167/48835268-aa5e5480-ed77-11e8-8330-c82875f1b13a.png
Do you have an idea for the reason of the problem? Is the way of importing grl on the SunsireProject true? Should I install more packages on the project to prevent the errors at ...java files? Thanks in advance.
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub https://github.com/ahundt/grl/issues/175, or mute the thread https://github.com/notifications/unsubscribe-auth/AADZwBtN60-6NyuwNDH69kTBAJoeo-M6ks5uxS4dgaJpZM4Ys2js .
-- Cheers! Andrew Hundt
Ph.D. Student Johns Hopkins University
 kamilcetin
kamilcetin However, as you see the java codes there are some miss class (such as
import org.zeromq.ZMQ;
import com.google.flatbuffers.FlatBufferBuilder;
import com.google.flatbuffers.Table;)
Do you think that I should also create those java class files to fix the problem?
However, as you see the java codes there are some miss class (such as
import org.zeromq.ZMQ;
import com.google.flatbuffers.FlatBufferBuilder;
import com.google.flatbuffers.Table;)
Do you think that I should also create those java class files to fix the problem?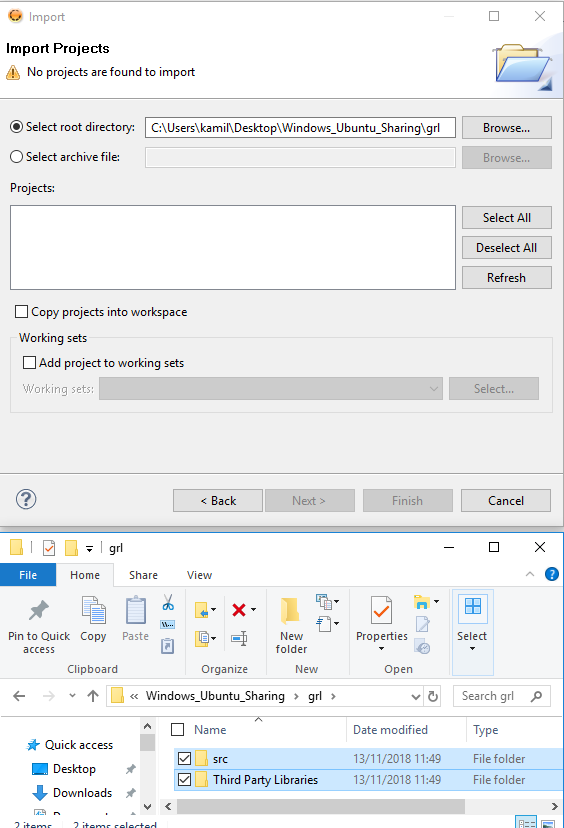{kind=link}
{kind=link}
I have some problem on importing grl project on Sunrise Workbench. I followed the instructions of Kuka LBR iiwa Java Setup at https://ahundt.github.io/grl/howto/iiwaKukaRobotSetup.html
I got stuck with the step of Setup Java Driver Software. I copy the folders in ${GRL_DIR}/src/java/grl/ from Ubuntu 16.04, then try to import the grl project with the Sunrise Workbench. However, when I select the grl folder from File > Import > General > Existing Projects into Sunrise Workspace GUI, the project does not seem on the list and it is not possible to Finish as shown below.
On the other side, when I import the grl project from File > Import > General > File System, it is loaded on the Sunrise Project. In this case, it is not possible to install the SunriseProject with imported files of grl onto the Kuka Controller due to the errors on the grl, grl.driver, grl.flatbuffer, grl.flatBufferTesting as shown below.
Do you have an idea for the reason of the problem? Is the way of importing grl on the SunsireProject true? Should I install more packages on the project to prevent the errors at ...java files? Thanks in advance.