 alex-87
commented
3 years ago
alex-87
commented
3 years ago Hello,
Sure ! Here is the explanation on how does the lib proceeds. For information, I didn't took this algorithm for any published paper (I don't know if any paper mentioning a similar algorithm exists). I decided to tackle this computational problem by passion for Hypergraphs and CSP (Constraint Solving Problem). This library was a school project. However, I've took information on hypergraphs from here :
- Graphs and Hypergraphs - Claude BERGE, 1973
- Problems of Unknown Complexity - Pascal Schweitzer, 2012
Modelling the CSP
The goal is to decide whether a mapping exists between vertex / edge adjacency of two hypergraphs. The modelling algorithm is in three parts :
- To model the adjacency between edges and vertex of the given hypergraph A
- To model the adjacency between edges and vertex of the given hypergraph B
- To indicate a relation between the adjacencies models
The algorithm
The algorithm is simple :
- To declare an integer array
Aof sizeS = size(V) x size(E)(number of vertex × number of edges) - For
iFrom1toS, loop over edges and vertex : if a vertex is linked to an edge,A[i] = i, elseA[i] = 0[CSP Constraint] - To do the same for the second hypergraph, with another array
Bof sizeS = size(V) x size(E)too - To declare an integer array
Mof sizeS = size(V) x size(E) - To loop over
AandB, asM[ A[i] ] = B[i]. [CSP Constraint] -
To make
distinct(M), as for eachp,qofM,p != q. [CSP Constraint]The arrays
Mof the CSP variable contains the mapping solution. If a valuation is found, in accordance with the CSP constraints, then the two hypergraphs are isomorphs.
Solve it with Gecode
In this section, an overview of the Gecode modelling. The complete source code of this section is available here
Modelling the adjacencies
Gecode offers a good way to model and solve the CSP.
The first part (To model the adjacency between edges and vertex of the given hypergraph A) :
for(boost::shared_ptr<HyperEdge>& e : edgeA ) {
for(boost::shared_ptr<HyperVertex>& v : vertexA ) {
// If the vertex is contained in the current edge
if( e->containVertex(v) ) {
Gecode::rel(*this, _bVarEdgeA[ j ], Gecode::IRT_EQ, j);
} else {
Gecode::rel(*this, _bVarEdgeA[ j ], Gecode::IRT_EQ, 0);
}
// Increment the relation index
j++;
}
}The second part (The same as the first part, for the second hypergraph)
for(boost::shared_ptr<HyperEdge>& e : edgeB ) {
for(boost::shared_ptr<HyperVertex>& v : vertexB ) {
// If the vertex is contained in the current edge
if( e->containVertex(v) ) {
Gecode::rel(*this, _bVarEdgeB[ j ], Gecode::IRT_EQ, j);
} else {
Gecode::rel(*this, _bVarEdgeB[ j ], Gecode::IRT_EQ, 0);
}
// Increment the relation index
j++;
}
}The thrid part (To indicate a relation between the adjacencies models)
int u( 0 );
for(int g=0; g < edgeA.size(); g++) {
for(int h=0; h < vertexA.size(); h++) {
// Linking the hypergraph adjency structure
Gecode::element(*this, _bVarEdgeA, _varEdge[u], _bVarEdgeB[u]);
u++;
}
}The fourth part (Distinct in values)
// To make index identifier unique for the mapping array
Gecode::distinct(*this, _varEdge );Searching a solution
Once the model is set, the following code initializes and proceeds to the research of a solution :
// Initializing the space search
IsomorphSpace * is = new IsomorphSpace(_ptrHypergrapheAbstraitA, _ptrHypergrapheAbstraitB);
// Posting the model contraints
is->postConstraints();
// Initializing the searcher (Deep-First Search)
Gecode::DFS<IsomorphSpace> ensembleSolution(is);
// If the system has a solution, then the hypergraphs are isomorph
if( ensembleSolution.next() ) ret = true;
else ret = false;
// Cleaning
delete is;In accordance with the find of a mapping function, if there is a solution, the two hypergraphs are isomorph.
I hope I've answered to your questions, Best regards.
 lady-bluecopper
lady-bluecopper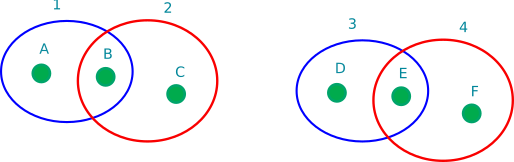
Hello, could you please share some information about the implementation of the hypergraph isomorphism algorithm? Did you implement some procedure taken from a published paper, or is it your own implementation? How does it work? Thanks!