karnikram
commented
6 years ago
karnikram
commented
6 years ago The convention is to ensure that the X and Z axes are aligned along the edges of the cardboard marker. This makes it easier to estimate the corner locations using the board dimensions as it is done here.
Regarding your second question, ensure that the topic name, intrinsic calibration values, and marker dimensions are set properly.
 panecho
panecho any advice? thanks for your reply.
any advice? thanks for your reply.

 XiaoJianFang
XiaoJianFang ericzzj1989
ericzzj1989 narutojxl
narutojxl
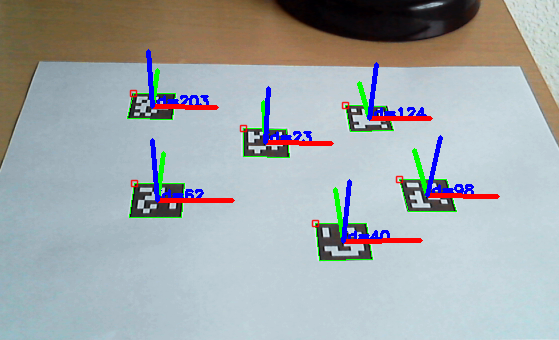
@ankitdhall I'm confused about the coordination description of aruco maker as you stress the importance of Y axis pointing outward while XY planer is lying on marker planer like the following picture in our daily usage. X(red), Y(green), Z(blue). Do that mean any special function of this difference? in addition, aruco_mapping detected no marker when I launch this package, any advice? thank you!