 at-wat
commented
3 years ago
at-wat
commented
3 years ago planner_3d doesn't have a single path as global path from the start to the goal.
But it calculates all paths to the goal from all possible positions as a distance map which is published to /planner_3d/debug when debug_mode parameter is "cost_estim".
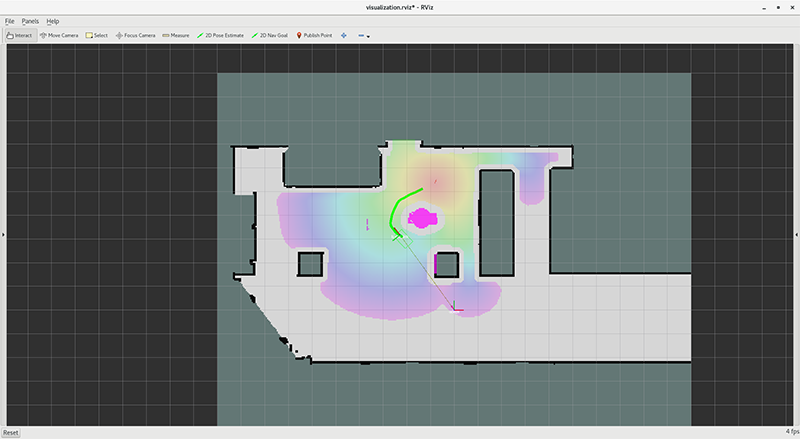 Gradation in this snapshot is a distance_map in planner_cspace and the global path from any start is determined by following the most steepest gradient direction from the start.
Gradation in this snapshot is a distance_map in planner_cspace and the global path from any start is determined by following the most steepest gradient direction from the start.
 HappySamuel
HappySamuel
Hi
Is there a way to visualize the global path from robot pose to target goal, like the global path in navigation stack? So far i only found the local path that generated.
Best, Samuel