qyp-robot
commented
2 years ago
qyp-robot
commented
2 years ago @atenpas
Open qyp-robot opened 2 years ago
qyp-robot
commented
2 years ago @atenpas
 muhammadhaq1
commented
2 years ago
muhammadhaq1
commented
2 years ago @qyp-robot Hi, Have you solved it?
qyp-robot
commented
2 years ago Sorry, I haven't solved it yet, I want to do experimental verification, but I'm not very familiar with ROS, it's a bit difficult for me, do you have a solution? @muhammadhaq1
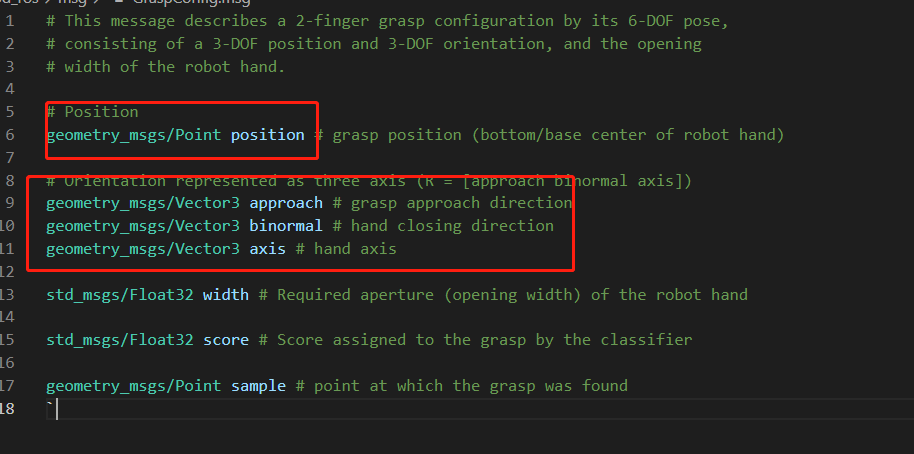
Hello, may I ask, I see the message output in the gpd_ros package, the position and attitude, which are in the camera coordinate system; and the transformation to the camera coordinate system is the correct pose information at the end of the robot. If I grab multiple objects in sequence, and set the final output posture to be 10, I want moveit to execute in sequence, and what format should it be passed to the move_group interface? If you have the relevant code can I refer to it? Thank you so much!