davidwatkins-bdai
commented
1 year ago
davidwatkins-bdai
commented
1 year ago This looks like a graphics issue and not something specific to the spot_ros2 repository. Please make sure you are correctly installing graphics libraries in your docker container.
 Jaynkd
Jaynkd
 jbarry-bdai
jbarry-bdai kzheng-bdai
kzheng-bdai khughes-bdai
khughes-bdai
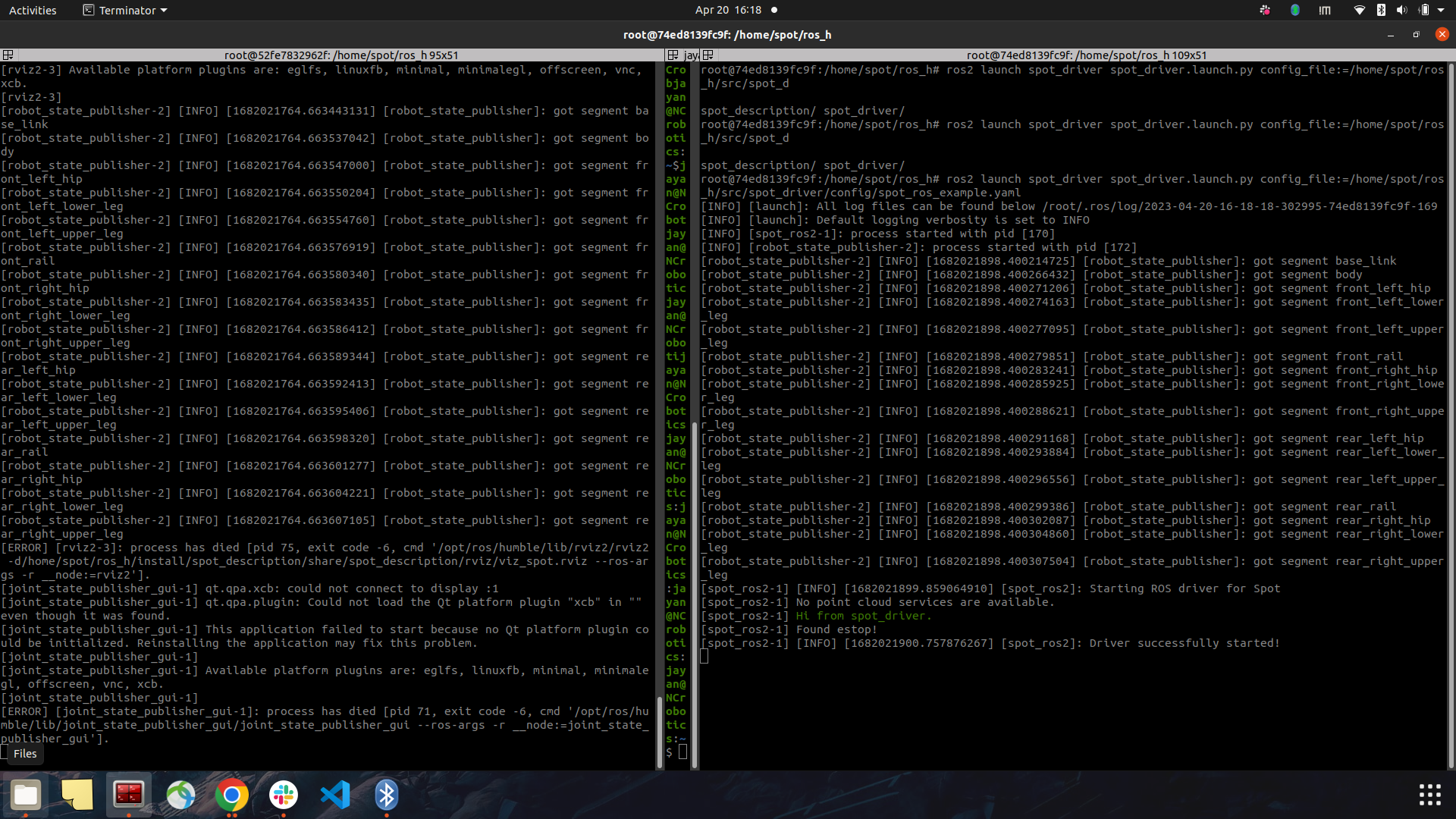
I followed the script in repo to install ros2 humble on a docker container and ran the following command: ros2 launch spot_description description.launch.py
I got the blank/black screen in rviz. I am running this on a docker built on ubuntu 22 base image with ros2 humble installed and relevant dependencies. Am I missing something?
Also, I am able to run spot driver in a different docker container. Shown below: