 beta-tester
commented
2 years ago
beta-tester
commented
2 years ago which ntpdate packet did you installed - just the depricated ntpdate package or the newer ntpsec-ntpdate ?
both ntpdate versions have similar options.
-t for timeout,
-u direct mode for better chance to come through firewalls.
-b to force step the clock instead of slew.
sudo ntpdate -buv -t 5 192.168.1.12
 AlexLandherr
AlexLandherr ComputerSmiths
ComputerSmiths
Hi,
I tried setting up this solution for my NTP server running on a Pi Zero 2 W and using the MAX-M8Q GNSS HAT. I am following this guide: NEO-M8T_GNSS_TIMING_HAT, NTP_Server
The setup shell script runs fine but when I run:
watch -n1 chronyc sourcestats -vI get this: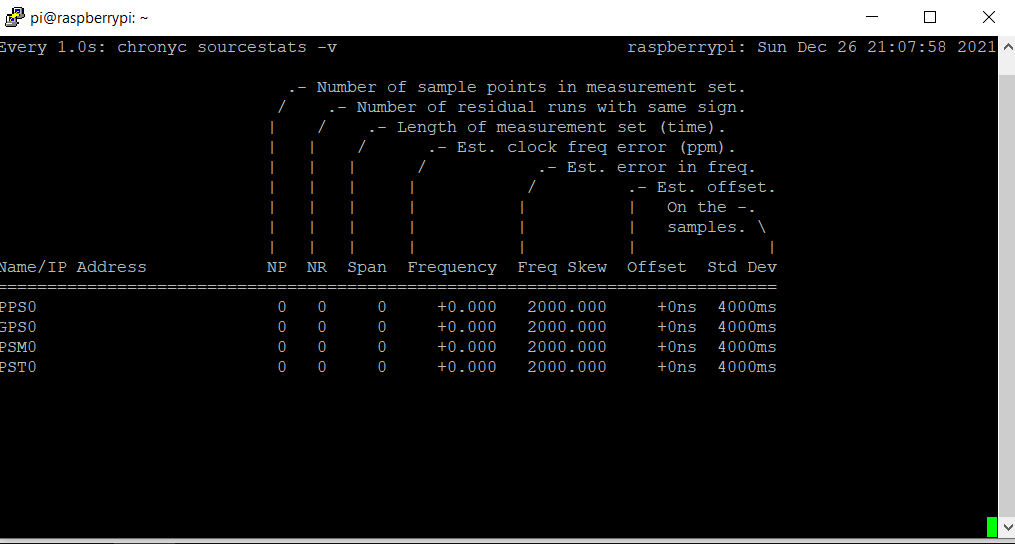
What could I be doing wrong?