 haslinghuis
commented
2 weeks ago
haslinghuis
commented
2 weeks ago @mrRobot62 please check https://github.com/betaflight/unified-targets/issues/1008
Closed mrRobot62 closed 2 weeks ago
haslinghuis
commented
2 weeks ago @mrRobot62 please check https://github.com/betaflight/unified-targets/issues/1008
 mrRobot62
commented
2 weeks ago
mrRobot62
commented
2 weeks ago Currently no success - tried all Flash chip which are defined, flashed 4.5.0 again - no success to. Did it based on #925 & #1008
mhm
mrRobot62
commented
2 weeks ago SUCCESSFULLY flashed
The solution is to set
FLASH FLASH_W25Q128FVWithout FLASH it will not work on this FC.
can be closed
haslinghuis
commented
2 weeks ago @mrRobot62 did you try with CLRACINGF4V2 as that config is the same - only swapping SDCard for flash chip
#define USE_FLASH
#define USE_FLASH_W25Q128FVah - no I didn't try this, because I didn't know that the diff between both configs are the SDCard / Flash chip things.
However, thanks for your brain kick ;-) - problem solved know for CLRACINGF4 - and maybe other owners of this FC can participate from this thread
Describe the bug
BF 4.4.x (Blackbox recording not possible)
I tested FWversion up from 4.4 to 4.5 and every time I struggle with this error
BF 4.3.2 (Blackbox recording OK)
with BF 4.3.2 with this board it is possible to activate BB logging.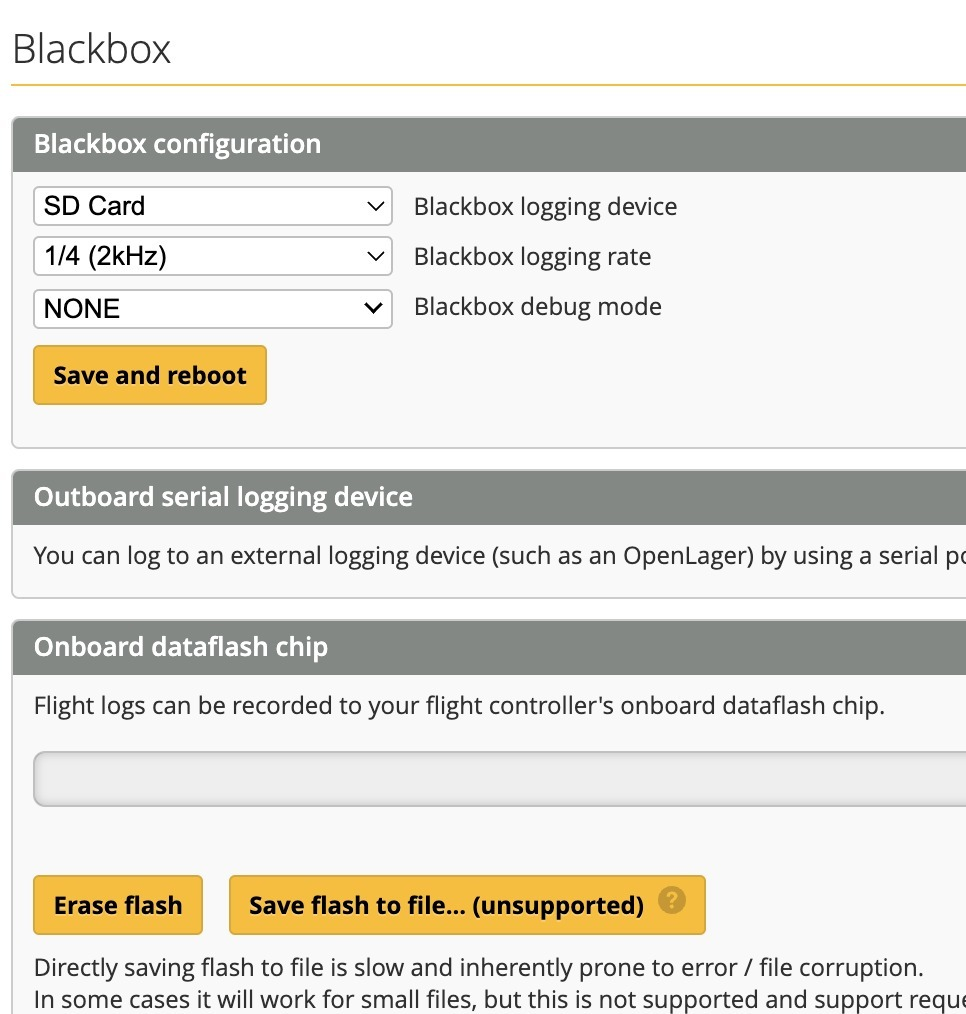
Both firmwares tested this with BF-Configurator 10.10.0
Manual for this board
To Reproduce
Install 4.3.2 and check if Blackbox logging is possible like above image. Change to >= 4.4.3 and you will get the error like in above image. I tried it with 4.5.0 with the same issue
Expected behavior
Expected behaviour: BB logging should be possible with >= 4.4.x FW version.
Support ID
Flight controller
CLRacing F405, Joshua Bardwel brand
Other components
No response
How are the different components wired up (including port information)
UART 4 = CRSF UART 6 = Walksnail VTX nothing more, no LEDs , no beeper
Add any other context about the problem that you think might be relevant here
I tried some cli commands around sd-card without any success. I tried the same sd-card config in cli from 4.3.2 and tried them in 4.4.3 and 4.5.0 without success.
Additional notes: following manual, I have to setup SDCARD for BB-logging but there is NO SDCARD (physically) used