 bgkatz
commented
2 years ago
bgkatz
commented
2 years ago Looks voltage limited. What motor are you using?
You can reach higher top speeds by increasing the field weakening (FW) current limit.
Closed MaximilianKoestler closed 2 years ago
bgkatz
commented
2 years ago Looks voltage limited. What motor are you using?
You can reach higher top speeds by increasing the field weakening (FW) current limit.
 MaximilianKoestler
commented
2 years ago
MaximilianKoestler
commented
2 years ago Thanks for the fast response!
I am using a Chinese clone of your original design (http://steadywin.cn/).
I will try increasing the field weakening current. I left it at the default of 0, so there is definitely potential there. I increased the value once before while I was still trying to properly tune the motor constants and stopped since the motor was drawing a lot of current and getting quite hot.
But now that the controller works well, I can give it another shot.
MaximilianKoestler
commented
2 years ago Increasing the FW current indeed increases the maximum velocity a bit, I have reached up to 8 rad/s at the output of the reducer now with I_FW_MAX == 10.0.
I do not really need that high speeds anyway and with a 1:36 reducer I guess I should also not expect more.
Thanks for looking into it!
Hi @bgkatz !
I got my motor hardware running with the firmware in this repo (after some adaptions outlined in my last comment in #8 ) and now I am diving deeper into testing.
The control is working relatively smoothly, but I was surprised to see that the velocity of the motor saturates very early. I am using a gear reduction of 1:36 right now and the velocity after reduction does not surpass 5 rad/s, even in pure open loop torque control mode.
Torque Control (ramp up to 1 Nm desired torque):
According to my bench power supply, the current consumption remains below 0.6 A at 24 V.
At higher voltages (40 V) I manage to achieve higher velocities: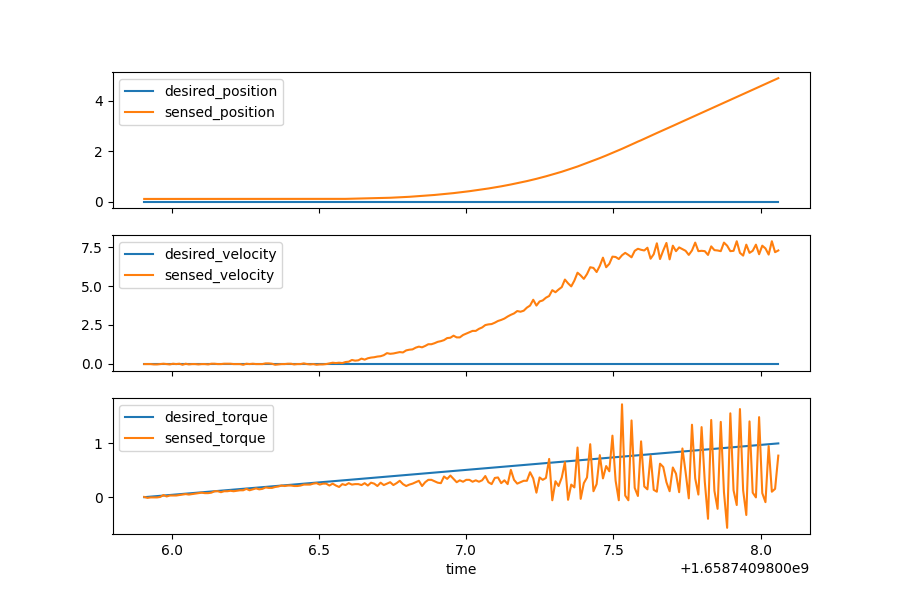
These are the current parameters in the setup menu:
Do you have an idea what the limiting factor might be here? I can of cause start poking around and arbitrarily raise limits for the currents and other parameters, but I decided I would rather ask before risking to fry yet another driver PCB (the previous frying did not occur with your new firmware by the way).