 leigh-johnson
commented
3 years ago
leigh-johnson
commented
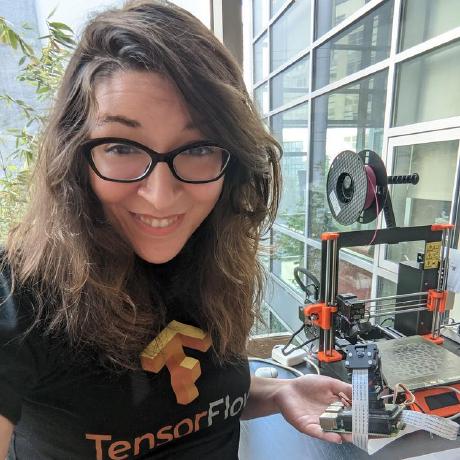
3 years ago Thank you for reporting this @Martin2kid, sorry about the behavior here being difficult to debug. I'm guessing the default PID gains do not work for the distance or relative angle of the camera to tracking target in your setup. Another possibility is that your camera needs to be rotated (--rotation <int>). The default rotation values match the camera orientation in this picture:

In 2.0 (target: end of year), I'm shipping a rework of the PID control system that will fix this behavior for the face model. I'm going to close this and consolidate updates about the PID system in #48.
I'm truly amazed at all of the prototypes being developed from this quick tutorial! The original tutorial code has poor API surfaces for additional development though, so I'm rewriting this tool to be usable as a library. I want to make it dead-simple to generate a new prototype app, optionally bring your own model, and calibrate the control scheme.
 Martin2kid
Martin2kid
Description
Describe what you were trying to get done; I tried to make RDP track face continueously with Edge TPU on Pi4 8GB with clean install only with RDP and I expected tracking would resume when subject re-appear in FOV but it hangs.
Tell us what happened, what went wrong, and what you expected to happen.; When I run (.venv) pi@raspberrypi:~ $ rpi-deep-pantilt track --edge-tpu face, As long as subject is in FOV, it works but when subject goes out of FOV, within in 10 second, cam is pointing up toward ceiling or facing down and stuck in there -- no tracking resume
When I run with (.venv) pi@raspberrypi:~ $ rpi-deep-pantilt track --edge-tpu person, As long as subject is in FOV, it works but when subject goes out of FOV, cam remain toward position of last jitter up & down and when subject return within FOV, cam is stuck pointing toward last position & stuck in there. -- no tracking resume
No Crash but, Upon use of face label; (.venv) pi@raspberrypi:~ $ rpi-deep-pantilt track --edge-tpu face ^C[INFO] You pressed
ctrl + c! Exiting... [INFO] You pressedctrl + c! Exiting... Process Process-2: [INFO] You pressedctrl + c! Exiting... Traceback (most recent call last): File "/usr/lib/python3.7/multiprocessing/process.py", line 297, in _bootstrap self.run() File "/usr/lib/python3.7/multiprocessing/process.py", line 99, in run self._target(*self._args, **self._kwargs) File "/home/pi/.venv/lib/python3.7/site-packages/rpi_deep_pantilt/detect/camera.py", line 38, in run_pantilt_detect prediction = model.predict(frame) File "/home/pi/.venv/lib/python3.7/site-packages/rpi_deep_pantilt/detect/facessd_mobilenet_v2.py", line 139, in predict input_tensor = input_tensor[tf.newaxis, ...] File "/home/pi/.venv/lib/python3.7/site-packages/tensorflow/python/ops/array_ops.py", line 944, in _slice_helper new_axis_mask |= (1 << index) KeyboardInterruptAborted! ^CError in atexit._run_exitfuncs: Traceback (most recent call last): File "/usr/lib/python3.7/multiprocessing/popen_fork.py", line 28, in poll pid, sts = os.waitpid(self.pid, flag) KeyboardInterrupt
Upon use of Person label; (.venv) pi@raspberrypi:~ $ rpi-deep-pantilt track --edge-tpu person ^C[INFO] You pressed
ctrl + c! Exiting... [INFO] You pressedctrl + c! Exiting... [INFO] You pressedctrl + c! Exiting...Aborted! Process Process-2: Traceback (most recent call last): File "/usr/lib/python3.7/multiprocessing/process.py", line 297, in _bootstrap self.run() File "/usr/lib/python3.7/multiprocessing/process.py", line 99, in run self._target(*self._args, **self._kwargs) File "/home/pi/.venv/lib/python3.7/site-packages/rpi_deep_pantilt/detect/camera.py", line 38, in run_pantilt_detect prediction = model.predict(frame) File "/home/pi/.venv/lib/python3.7/site-packages/rpi_deep_pantilt/detect/ssd_mobilenet_v3_coco.py", line 160, in predict self.tflite_interpreter.invoke() File "/home/pi/.venv/lib/python3.7/site-packages/tflite_runtime/interpreter.py", line 506, in invoke self._interpreter.Invoke() File "/home/pi/.venv/lib/python3.7/site-packages/tflite_runtime/interpreter_wrapper.py", line 118, in Invoke return _interpreter_wrapper.InterpreterWrapper_Invoke(self) KeyboardInterrupt ^CError in atexit._run_exitfuncs: Traceback (most recent call last): File "/usr/lib/python3.7/multiprocessing/popen_fork.py", line 28, in poll pid, sts = os.waitpid(self.pid, flag) KeyboardInterrupt
Am I missing any component or applying wrong command?