 NickM-27
commented
8 months ago
NickM-27
commented
8 months ago you are misunderstanding how frigate works, each "event" correlates to a specific object. So when you look at the snapshot for the car event only the car will have a box, the people will have their own separate events.
 CrashOverride-Git
CrashOverride-Git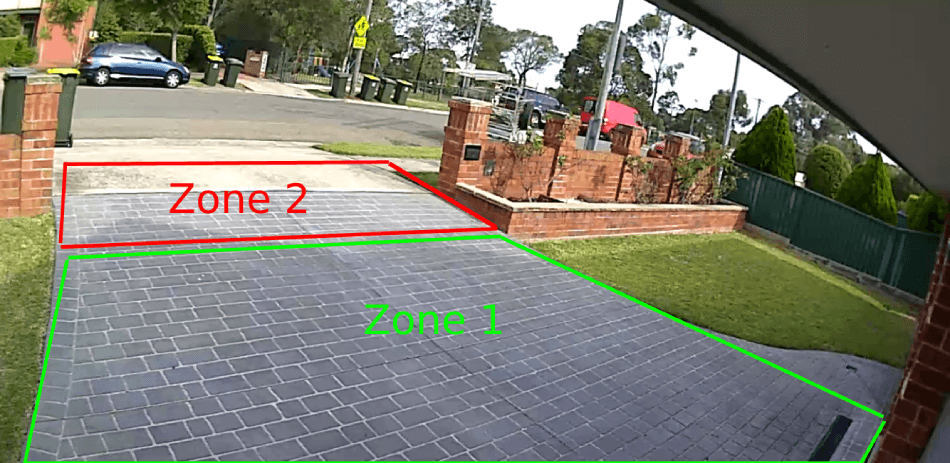
Describe the problem you are having
Hello, I am having problem with the zones and the object to track. For this camera, what I want to achieve is to track (record, snapshot etc) only people in the orange zone "zona_corsello_box" and cars + people on the yellow one "zona_corsello_box_strada". What I get instead is the detection and tracking only into the orange zone, the yellow one is completely ignored.
The result is that if a car is parked there, all the people behind it are invisible for the google coral unless they move on front of the car (but maybe this is an hardware limitation of the google coral.. I am not an expert). Other cameras are ok, since have only to detect people (but maybe are affected by the same issue).
Could you help me?
this is an example of the secondary problem I have.
Only the person in front of the camera is detected, the car and a third person near the corner of the house are ignored.
Here instead it detects the car (nearest to the camera) and totally ignore the two persons
Version
0.12.1-367D724
Frigate config file
Relevant log output