 blodow
commented
3 years ago
blodow
commented
3 years ago Hi Yihui!
I am sure the best person to ask would be jimmy, as his work is most recent on this project, it's been about 8 years that I've actively worked on this. The topic is published because of the advertiseCamera calls (https://github.com/JimmyDaSilva/realtime_urdf_filter/blob/current-settings/src/urdf_filter.cpp#L108-L112), see also the docs (http://docs.ros.org/en/diamondback/api/image_transport/html/classimage__transport_1_1ImageTransport.html). I am not sure I can give any more details in this regard :D
Cheers, Nico
 JimmyDaSilva
JimmyDaSilva lyh458
lyh458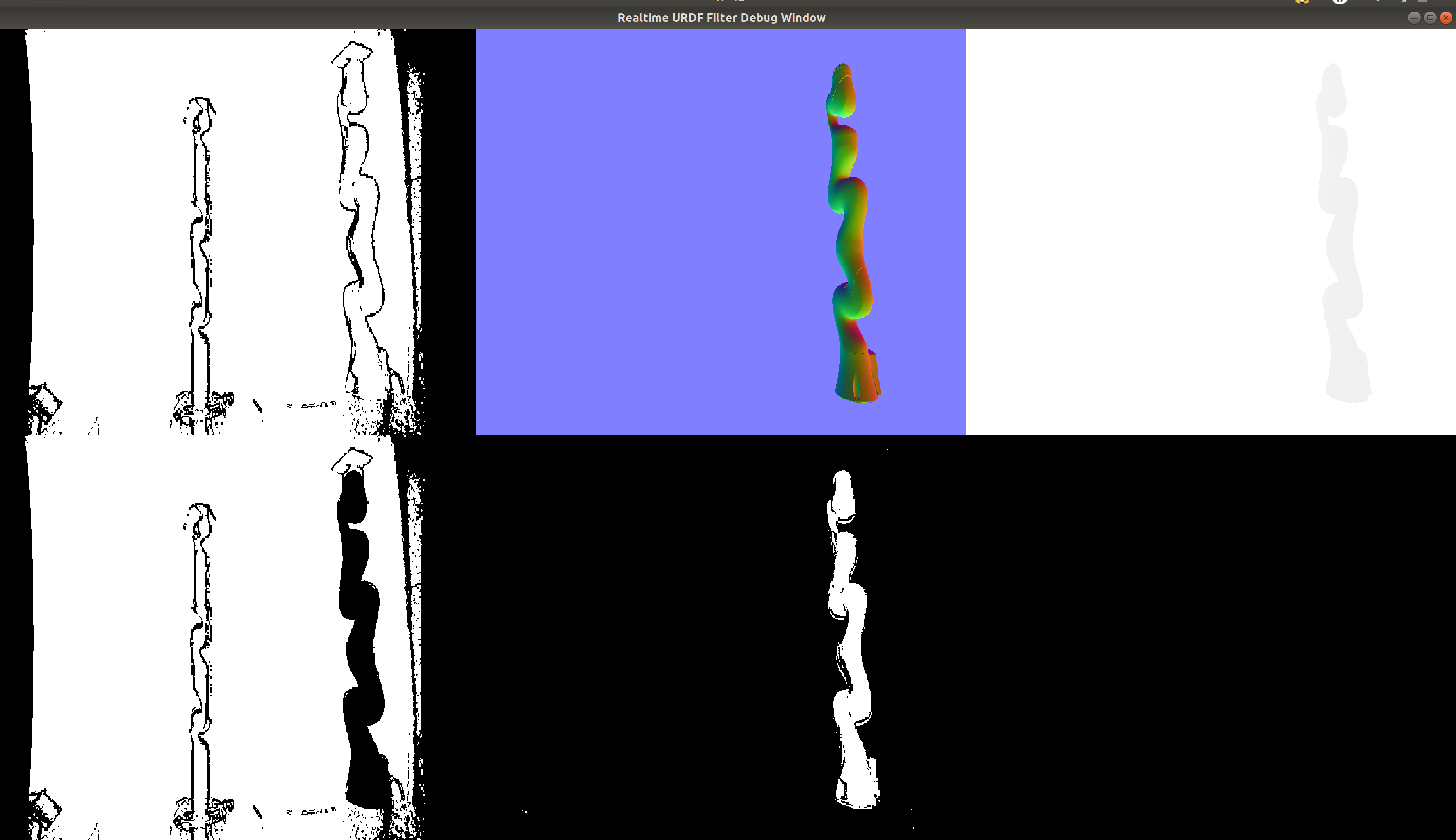 Is that normal?
Is that normal?
Hi, thanks for your awesome works! When I use the forked repo of Jimmy DA SILVA @JimmyDaSilva with the command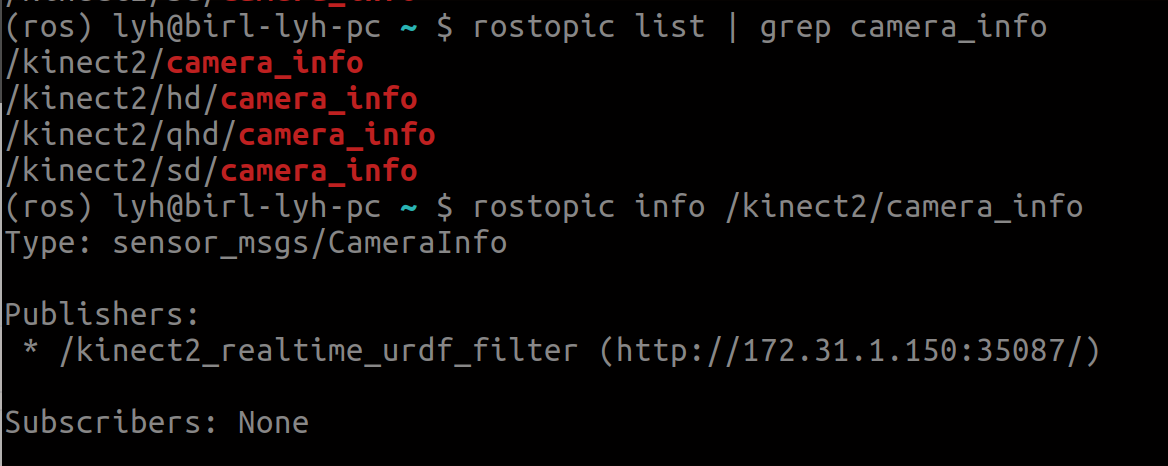 among the topics in the picture above, topics:
among the topics in the picture above, topics:
roslaunch realtime_urdf_filter filter_kinectV2.launch kinect_name:=kinect2 quality:=qhd, a new topic /kinect2/camera_info was published by node /kinect2_realtime_urdf_filterare published by the diver of Kinect V2.
I am so doubted that why does the topic /kinect2/camera_info be published by the node /kinect2_realtime_urdf_filter and where defined the publisher? Is there any use of this topic?
And here is my code of filter_kinectV2.launch
and the filter_kinectV2_parameters.yaml:
Thanks again!