 btsimonh
commented
5 years ago
btsimonh
commented
5 years ago hi @gaucho1978, no, I torched one of my twin boards (managed to supply 36v to a processor pin). When I ordered replacements, it came as the more standard single board, so I just fitted that. I would recommend finding a single motherboard set on ebay, and fitting that, then you can install this kind of firmware and have both computer control capability, and a pretty good replica of original hoverboard functionality. s
 tequilahut
tequilahut gaucho1978
gaucho1978 p-h-a-i-l
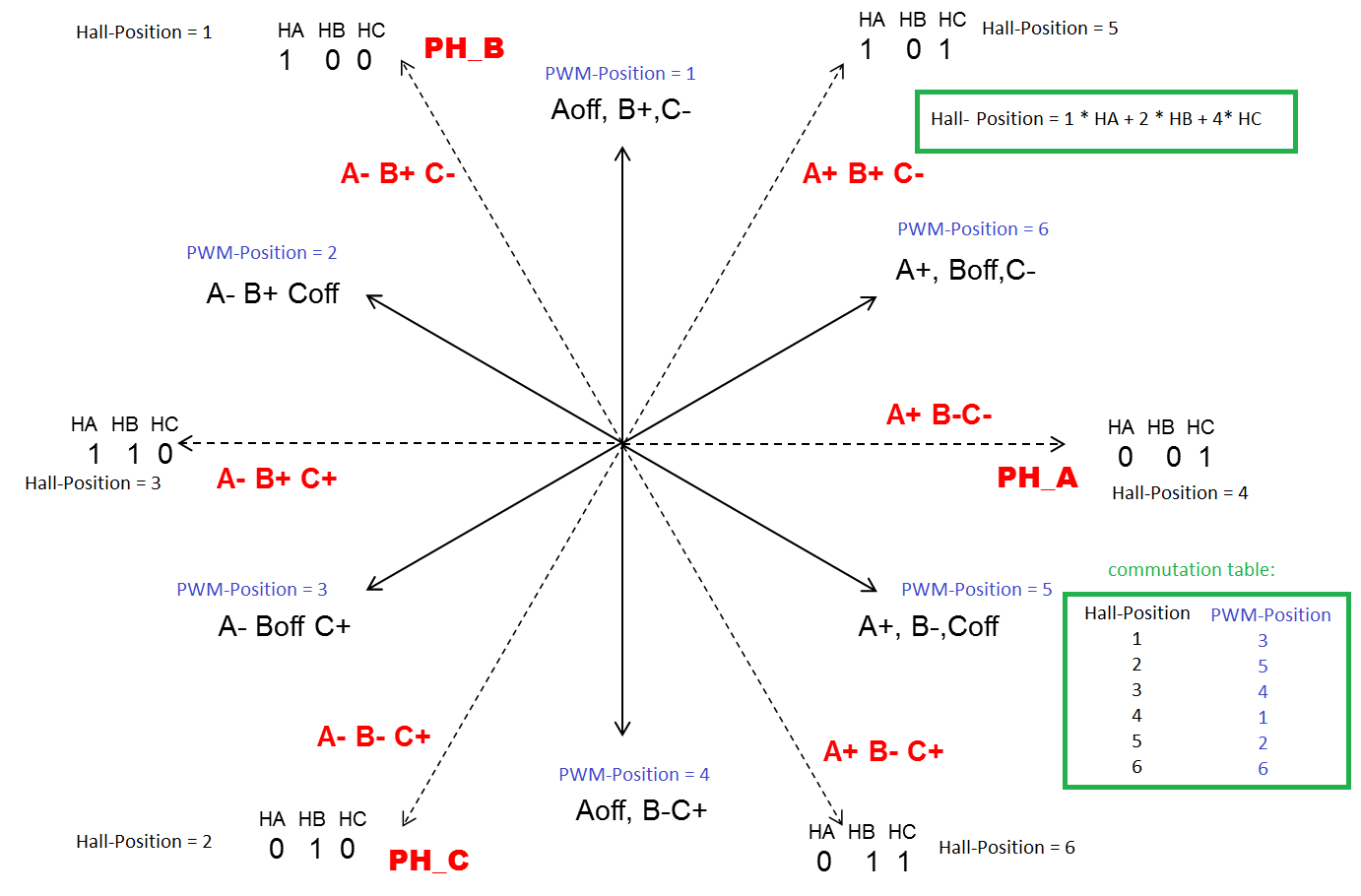
p-h-a-i-l You can see the small hall sensor PCB. It only detects one position, which is still one electrical revolution.
You can see the small hall sensor PCB. It only detects one position, which is still one electrical revolution. renmalek7
renmalek7
{kind=link}
Your work is amazing. I have gen2 hoverboard (the one with 2 boards instead of one) and I would like to be able to restore it with hoverboard functionality. Any hint?