 btx0424
commented
11 months ago
btx0424
commented
11 months ago Using omni_drones in extensions is currently not supported. We have to hold off on our future plan due to the delayed release of Isaac Sim 2023.1.0, but interactive usage (as extensions) is on the list. Unfortunately, I am not sure about my bandwidth in the next few months because I need to prepare for my PhD application. Are you interested in helping us develop it? If so, it would be great to have a further discussion.
Regarding parameter tuning, I think an alternative, which also leverages the parallelism, is to perform stochastic/bayesian optimization over the controller parameters. You can set up the task (set/distribution) of interest (e.g., tracking) and efficiently evaluate sampled controller parameters in the parallel environments.
What do you think?
 HGGshiwo
HGGshiwo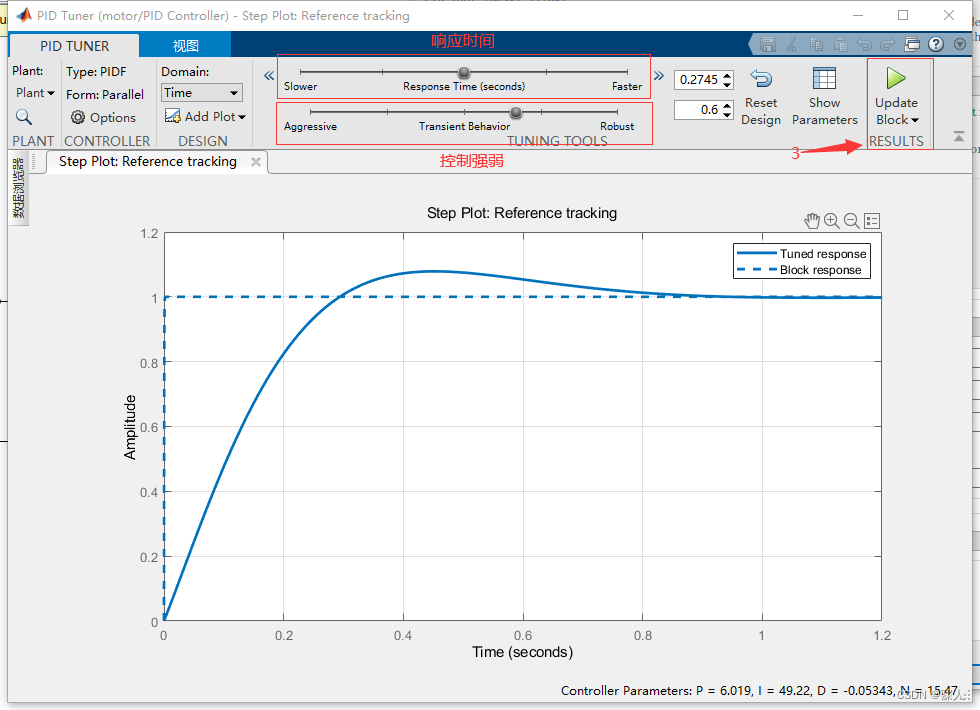
For some reason, it is more convience for me to use omni_drones in extensions rather than standalone applications, like tuning some parameters in pid controllers.
So I wonder is it possible to do that?