 casiarobot
commented
5 years ago
casiarobot
commented
5 years ago the same to me
Open shrijan00 opened 5 years ago
casiarobot
commented
5 years ago the same to me
 shrijan00
commented
5 years ago
shrijan00
commented
5 years ago So,
I recorded my bag once again including the /clock as well this time. I ran the same configuration by setting use_odometry = true and odometry_sampling_ratio = 0.1 and it is working now.
But I'm getting warning messages as you can see in the image.
 I know the error which I was getting was due to the difference in the rate at which data was being published in Gazebo and when launched with Cartographer, it throws an error. Maybe this is not a good workaround but it worked for me.
Please correct me if I'm wrong.
I know the error which I was getting was due to the difference in the rate at which data was being published in Gazebo and when launched with Cartographer, it throws an error. Maybe this is not a good workaround but it worked for me.
Please correct me if I'm wrong.
 wilcobonestroo
commented
5 years ago
wilcobonestroo
commented
5 years ago What command do you use to play back the rosbag? (do you use --clock or not?)
shrijan00
commented
5 years ago Yes, I do use --clock. You can see my node playbag (3rd line from the bottom) in the launch file i posted earlier.
 MichaelGrupp
commented
5 years ago
MichaelGrupp
commented
5 years ago Check if your sensor data is strictly time ordered. You can use the cartographer_rosbag_validate tool for that as described in the documentation of Cartographer ROS. You wrote that the error is gone by decreasing the sampling ratio - this could suggest that you just sampled out an invalid data chunk.
The second warning could be caused by replaying the bagfile in the same ROS core session, i.e. resetting the published --clock and affecting some node. If you don't find the root of this, restart the roscore and other nodes you might have together with your Cartographer session.
For debugging purposes you can also have a look at cartographer_dev_rosbag_publisher instead of simulation time, which republishes the data with fresh timestamps and can be called repeatedly without annoying warnings.
wilcobonestroo
commented
5 years ago I assume you have recorded the clock as well. If you use --clock there will be multiple publishers on the clock topic. Try running without the --clock option.
shrijan00
commented
5 years ago Hi,
Sorry the for the delayed response
@MichaelGrupp @wilcobonestroo I did the Validation this time as mentioned. Here is the screenshot for the bag file.
 So I followed like what you suggested that there must be multiple publishers on the clock topic, so I removed --clock from my launch file.
So I followed like what you suggested that there must be multiple publishers on the clock topic, so I removed --clock from my launch file.
<node name="playbag" pkg="rosbag" type="play" args="$(find cartographer_ros)/bag/new_test.bag">
And indeed it was the issue and so no more warning messages. So everything looks good.

The only thing is in order to run the Cartographer I'm using a low value for odometry_sampling_ratio as mentioned earlier. Thanx alot everyone.
 ojura
commented
5 years ago
ojura
commented
5 years ago @shrijan00 Low value for the odometry sampling ratio is only hiding the problem. That is a bad solution.
Guys, sorry for introducing these sampling ratio options, it is partially my fault. I originally introduced it for the lidar (which actually makes a lot of sense, it’s a cheap way to speed things up if slam works okay for you using a fraction of the lidar data).
Then, for “completeness” we added the sampling ratios for odometry and also for the imu (which is especially silly, in retrospective). The result is that many people concluded they could “fix” their timing issues by just decimating their odometry or imu data. I propose we remove the odometry and imu sampling ratio options, or print fat warning or require special flags to discourage users from using these options.
shrijan00
commented
5 years ago @ojura Yeah Exactly. Even I was not satisfied with the following solution but it made it work so I ignored it. Apart from using odometry sampling ratio, is there no other way to fix this since I do need the odometry data along with LiDAR for my application?
 Fanny-one
commented
4 years ago
Fanny-one
commented
4 years ago @shrijan00
Hi, I have met the same problem and the above replys give me a good answer.
Also , I find you are testing the same project very likely. Now what about your progress and can we
communicate with each other?
https://github.com/nickcharron/waypoint_nav
Hi all,
So I recorded a bag file consisting of 2d lidar scan, tf, tf_static and odometry data(fusing imu and wheel odom).
rosbag record /tf /tf_static /odometry/filtered /scanSo when i try to use the bag file in cartography without the odometry, it works perfectly fine. In that case I'm using this configuration
`include "map_builder.lua" include "trajectory_builder.lua"
options = { map_builder = MAP_BUILDER, trajectory_builder = TRAJECTORY_BUILDER, map_frame = "map", tracking_frame = "base_link", published_frame = "base_link", odom_frame = "odom", provide_odom_frame = true, publish_frame_projected_to_2d = false, use_odometry = false, use_nav_sat = false, use_landmarks = false, num_laser_scans = 1, num_multi_echo_laser_scans = 0, num_subdivisions_per_laser_scan = 1, num_point_clouds = 0, lookup_transform_timeout_sec = 0.2, submap_publish_period_sec = 0.3, pose_publish_period_sec = 5e-3, trajectory_publish_period_sec = 30e-3, rangefinder_sampling_ratio = 1., odometry_sampling_ratio = 1., fixed_frame_pose_sampling_ratio = 1., imu_sampling_ratio = 1., landmarks_sampling_ratio = 1., }
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true TRAJECTORY_BUILDER_2D.use_imu_data = false TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.15 TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.angular_search_window = math.rad(35.)
POSE_GRAPH.optimization_problem.huber_scale = 1e2
return options` and my launch file is this
and my tf tree is proper in this case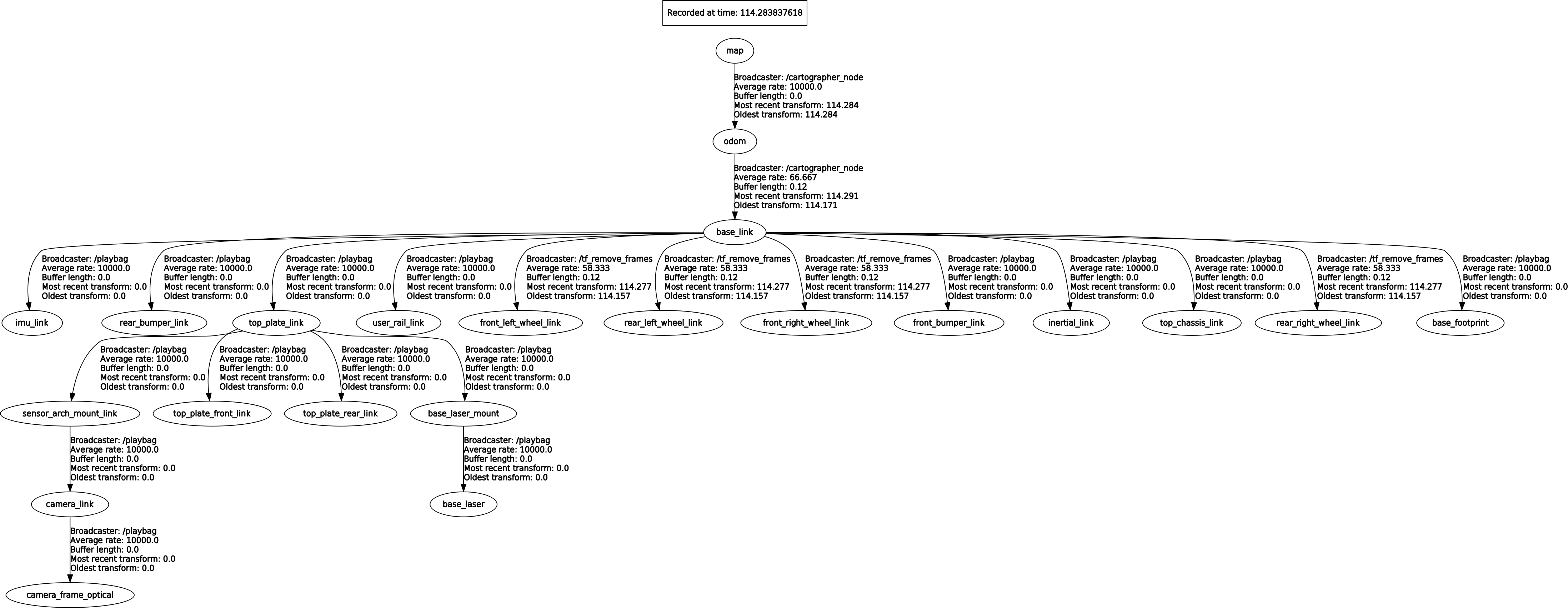
So, the issue comes when I want to use the odometry. For that I just change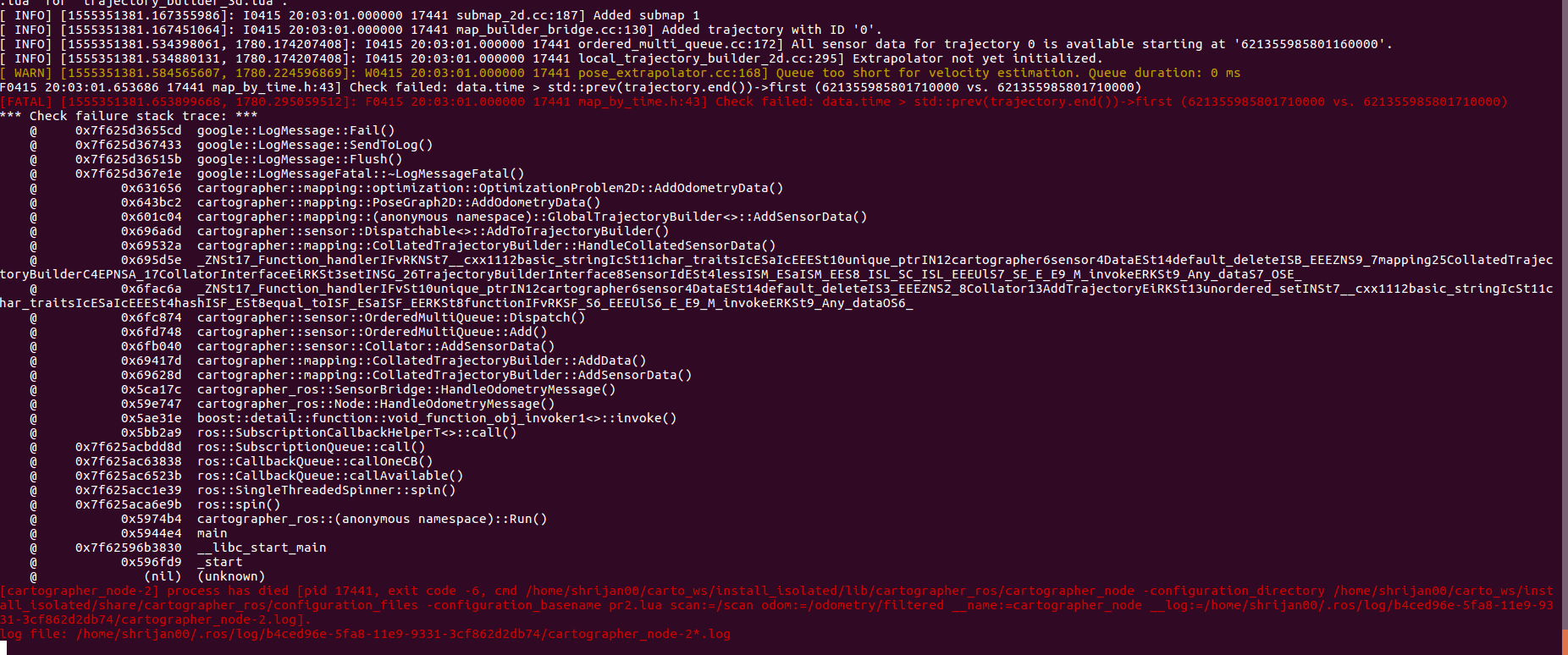 Can anyone please help me how to enable the odometry so that the cartographer can access both lidar and odometry data to build map and localise itself.
Can anyone please help me how to enable the odometry so that the cartographer can access both lidar and odometry data to build map and localise itself.
use_odometry = truein the above lua. And using the same launch file when I try to run I get this error