tulku
commented
2 years ago
tulku
commented
2 years ago @ValerioMa this is great to see! One question though, do you have a matching version of cartographer-ros that works with these changes? Maybe I did something wrong, but I failed to build the assets_writer.cc while trying this change.
 ValerioMagnago
ValerioMagnago
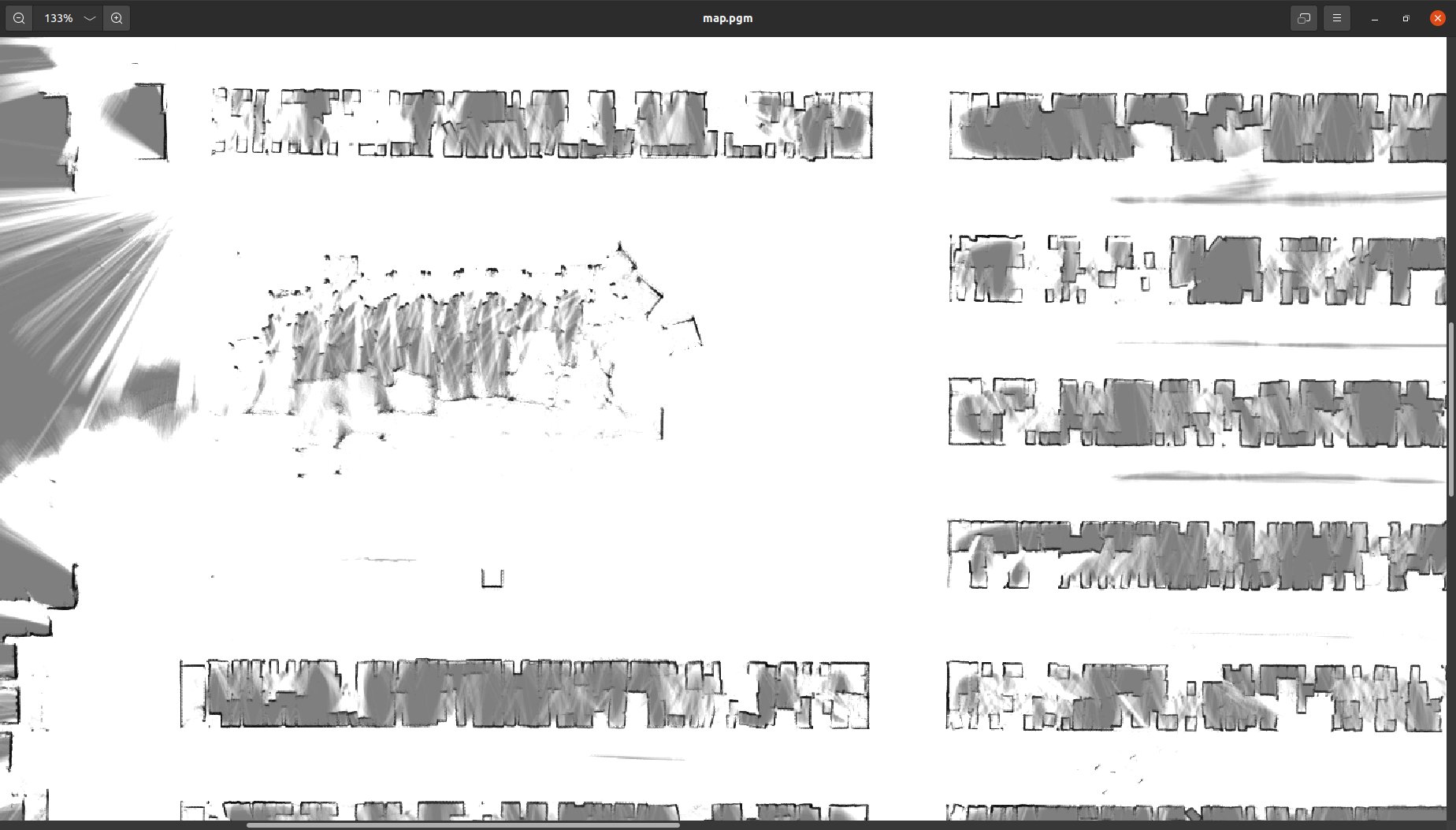
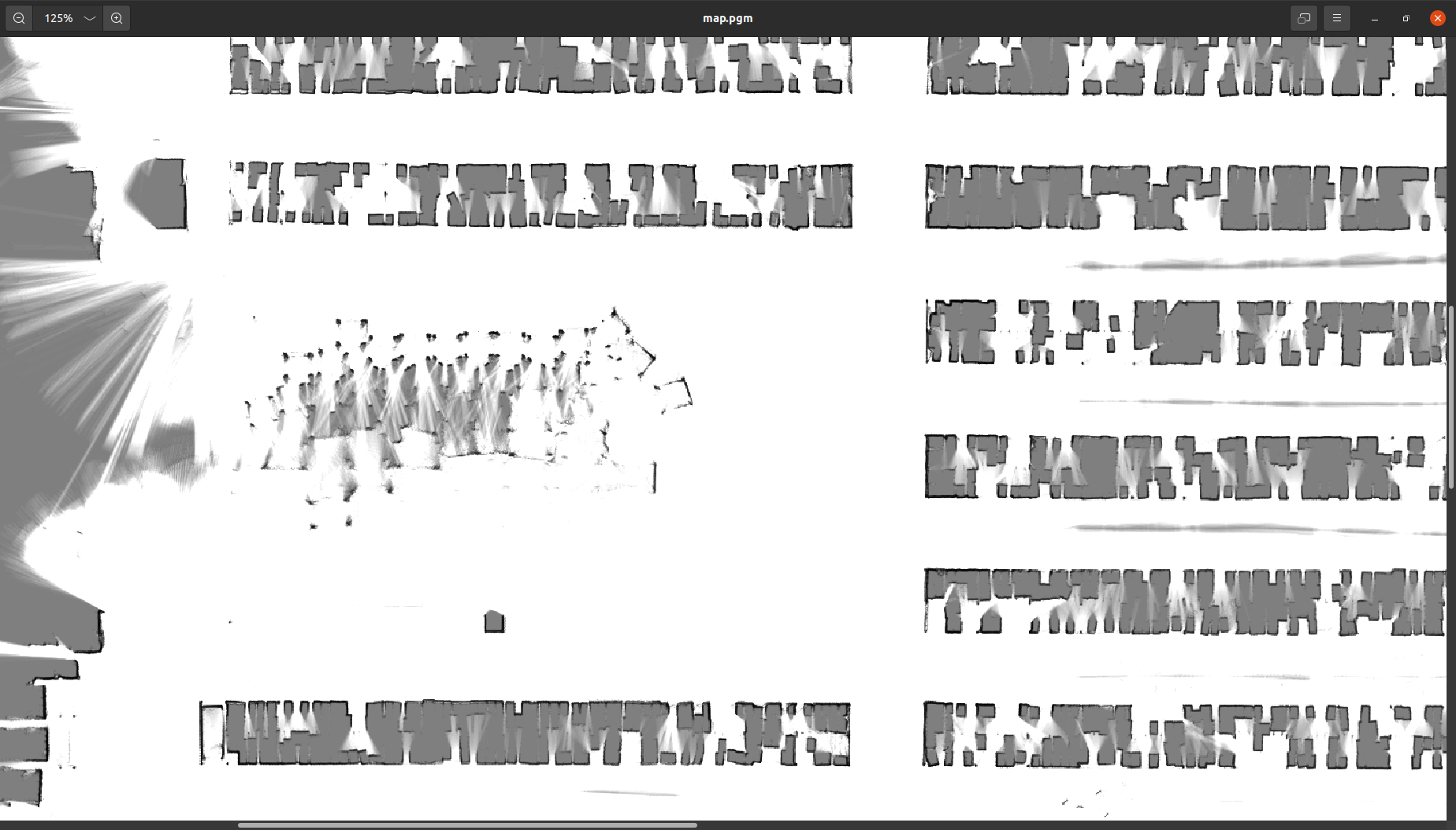
Adds the laser ray origin to
RangefinderPointto enable correct raytracing of range data misses into a 2D probability grid also after scan accumulation.Previously, all rays were casted from their hit point to the tracking frame. This is wrong for any setup where the tracking frame is not the sensor frame and leads to artifacts in the map.
Fixes: #947
Below an example of a map generated from a multiple 2D laser scanners configuration, which are not centered in the tracking frame, before and after the proposed fix. It can be seen clearly that the previous version of the software was cutting and cleaning the corners of the map due to the imprecise origin used for raytracing. This caused the exclusion of large structures from the map.