 gaschler
commented
6 years ago
gaschler
commented
6 years ago I had a quick look at the validation output.
E0120 14:11:31.667201 8468 rosbag_validate_main.cc:299] Average IMU linear acceleration is 3.92273 m/s^2, expected is [9.5, 10.5] m/s^2. Linear acceleration data should include gravity and be given in m/s^2.
This means IMU data will be useless to cartographer. Likely causes are either the measurement format is very strange or you artificially set dropped IMU frames to zero. I believe the latter. Fix this.
E0120 14:11:31.352073 8468 rosbag_validate_main.cc:131] Input contains transform message from frame_id "map" to child_frame_id "odom". This is almost always output published by cartographer and should not appear as input. (Unless you have some complex remove_frames configuration, this is will not work. Simplest solution is to record input without cartographer running.)
Please double-check that the odom/ from the bag is neither used by cartographer or rviz.
As with all tuning issues, first resolve input data issues, second tune local slam only (setting POSE_GRAPH.optimize_every_n_nodes = 0). Local Slam should drift only after a couple of submaps are created.
Hope this helps.
 mjason3
mjason3
Hi, I am trying the cargographer on turtlebot compatible hardware and the output map in RVIZ is quite weird looks like below. Could anyone kindly let me know what's wrong with my settings?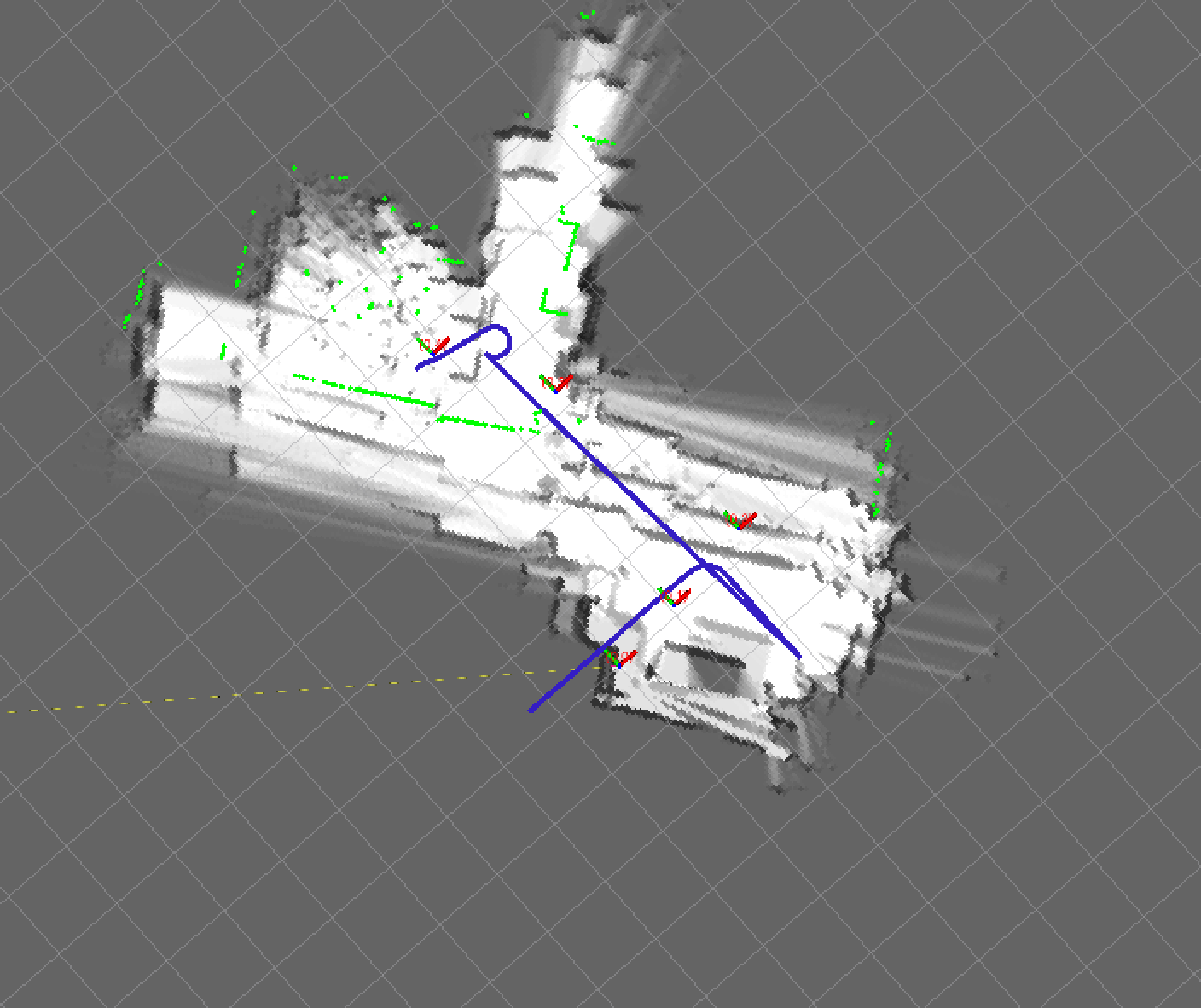
The output of rosbag_validate: https://gist.github.com/mjason3/06159d1abf7c27858f418c83c355dd0e
Github branch for reproduce with command:
roslaunch cartographer_turtlebot play_turtlebot_lidar_2d.launch bag_filename:=/tmp/test_carto_2018-01-20-13-56-40.bagPls. download the recorded bag from my google drive.This is the lidar spec i am using: https://github.com/EAIBOT/ydlidar/blob/master/launch/f4.launch