 christianrauch
commented
3 years ago
christianrauch
commented
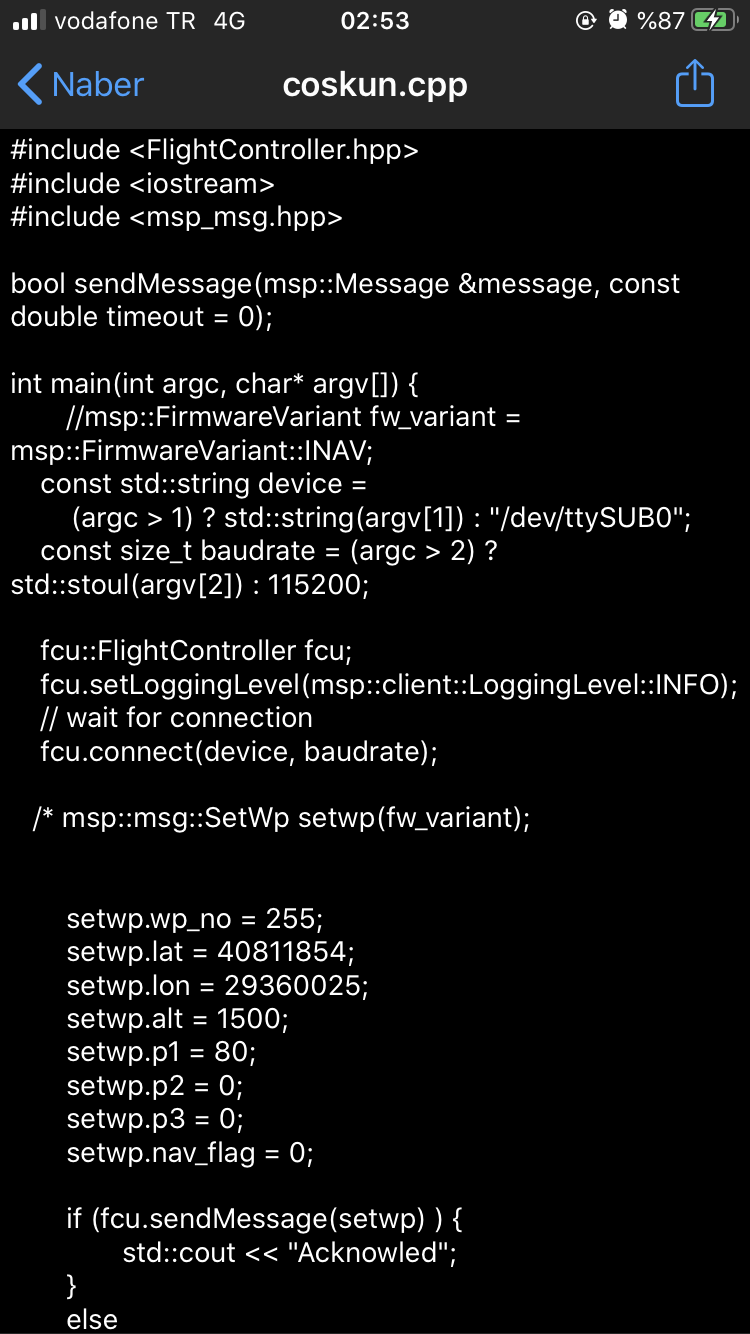
3 years ago I have not tested the MSP_SET_WP message before. If you provide a minimal source example to reproduce this issue (as plain text, not screenshots of text) I can try to reproduce this in my Betaflight setup.
You can increase the logger level to debug to get more informative output. Looking at the source code, receiving this error indicates that ok_id is false, which means that the direction byte is !. This is typically the case if the FCU does not support the requested MSP ID.
Your EOF message may further indicate a connection error. A request with an unsupported MSP ID should not cause connection issues. Have you encountered other connection issues over your serial connection?
Can you:
- Test this with an MSPv1 connection instead of the MSPv2 connection.
- Verify that this message works correctly with the iNav GUI with MSP version 1 and 2 connections.
- Test the connection via a USB connection (USB-to-Serial adapter on FCU) to rule out disturbances with unshielded plain serial connections.
 DC-SWAT
DC-SWAT SALTU-19
SALTU-19
i have f4 flight card with inav and raspberry pi zero.I want to send waypoint to my flight card with set_wp.I have an error("message v2 with id 209 is not recognized").What am i gonna do ?
@christianrauch