 christianrauch
commented
3 years ago
christianrauch
commented
3 years ago Which betaflight version are you using? I can only test with betafligth 3.5 due to hardware limitations.
Is everything working as expected on your PC with a USB connection? The error only appears on the Raspberry Pi with a serial connection? Can you specify what is working and what is not working on your PC and on the Raspberry Pi?
The "box names" are unrelated to the MSP RX functionality. From your logs (please provide raw text instead of screenshots), I can only suggest that there is a transmission error.
 ucanAlp
ucanAlp
Hi.Thanks for useful source.I have a problem with this. I can take sensor data from usb on computer. Also while I'm using UART6 on omnibus and serial rx/tx on raspberry pi I can take these datas as same.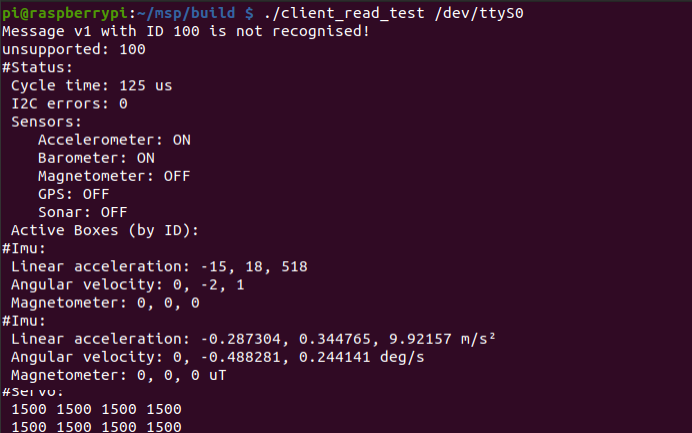
But when I try to run fcu_motors on computer I take this error:
Also when I run it on raspberry pi it throwing this: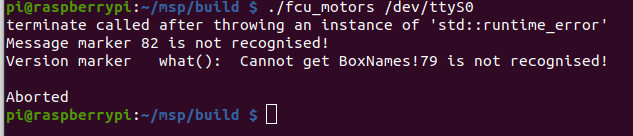
I activated MSP on betaflight port tab also set MSP RX input at configuration tab. What can I do about this? Thanks.