 yasuohayashibara
commented
8 months ago
yasuohayashibara
commented
8 months ago availableを追加した ボールが近づかないとキックの行動を選択しないので,無駄な動きが減少したように見える.
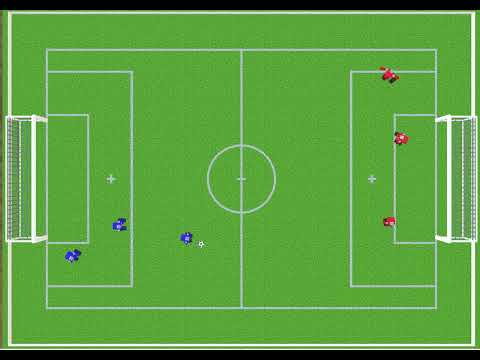
available無
IsaacGymSoccer (2440ep (100step reset)+2177ep (1000step reset))
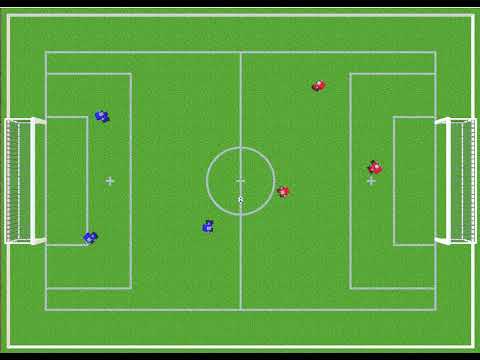
available有
IsaacGymSoccer (2440ep (100step reset)+2177ep (1000step reset))
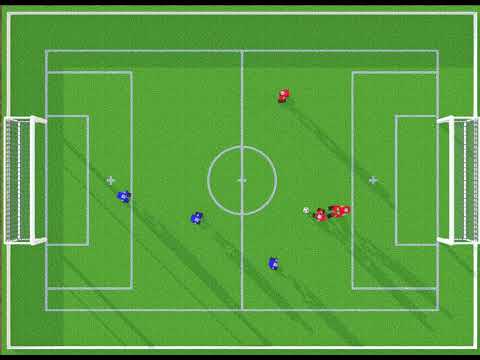
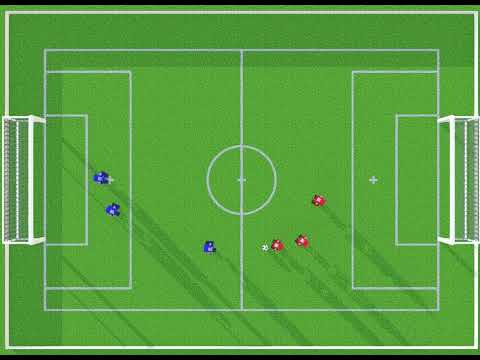
ボールが目の前に無い場合でもキックをしている何かバグがあるかもしれない.
IsaacGymの学習済みモデルをインポートするためのブランチ