ahmed-moubtahij
commented
1 year ago
ahmed-moubtahij
commented
1 year ago I keep receiving emails of replies here on shady-haze@hotmail.com, and I get an error page when I try to unsubscribe. Can someone remove me from the mailing list? Thanks
 saxtot
saxtot
This is a draft PR about the work that has been done with our Ovis 6 DOF robot and MoveIT! The goal of this project was to be able to jog our robot in the cartesian space in realtime with an Xbox controller. The Cartesian space is a way of describing the pose ( position and orientation) of a robot's end-effector. We wanted to do position incremental control. We found out that Cartesian position control is not fit for real-time jogging like we want. The next step for real time jogging would be cartesian velocity control of the end-effector.
Although, we can now use a RVIZ to dictate a pose to the robot, and he adopts it without issues. A collision and singularity avoidance algorithm is in place, it makes the IK solutions reliable. I think it would be usable for approach movements in competition via Rviz directly of via the controls we implemented with the Xbox controller. The integration of this project to work on remote computer is not yet done.
Two main packages have been created for this project:
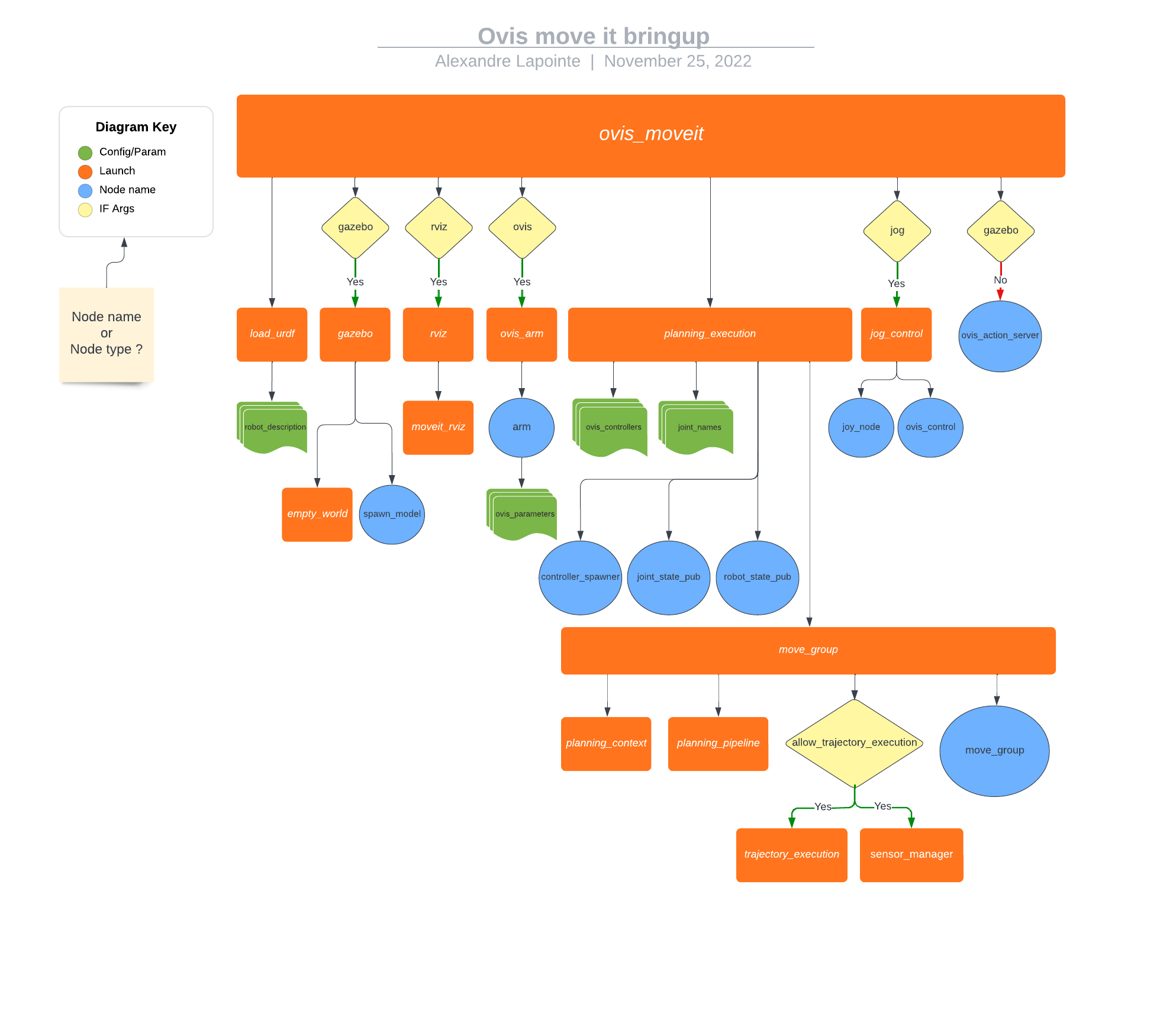
ovis_moveit package: is the one generated by moveit itself after giving it our robot URDF. It contains the move_group node, which is the main actor in the package.ovis_jog_control: is the node that we created to interface moveit's work with our actual robot. It's like a upper level python interface to interact with the move group node and send out commands to the physical robot via an action server. UI commands would preferably pass through this node and be paralleled with implemented controls so that development can still be made in the future.This is a top of my head description, so it is incomplete. I hope discussions will enrich this description.
Here is a launch schematic to help you understand the structure Alex put in place to test the robot system IRL and via gazebo simulator, or both at the same time !