bradbell
commented
1 year ago
bradbell
commented
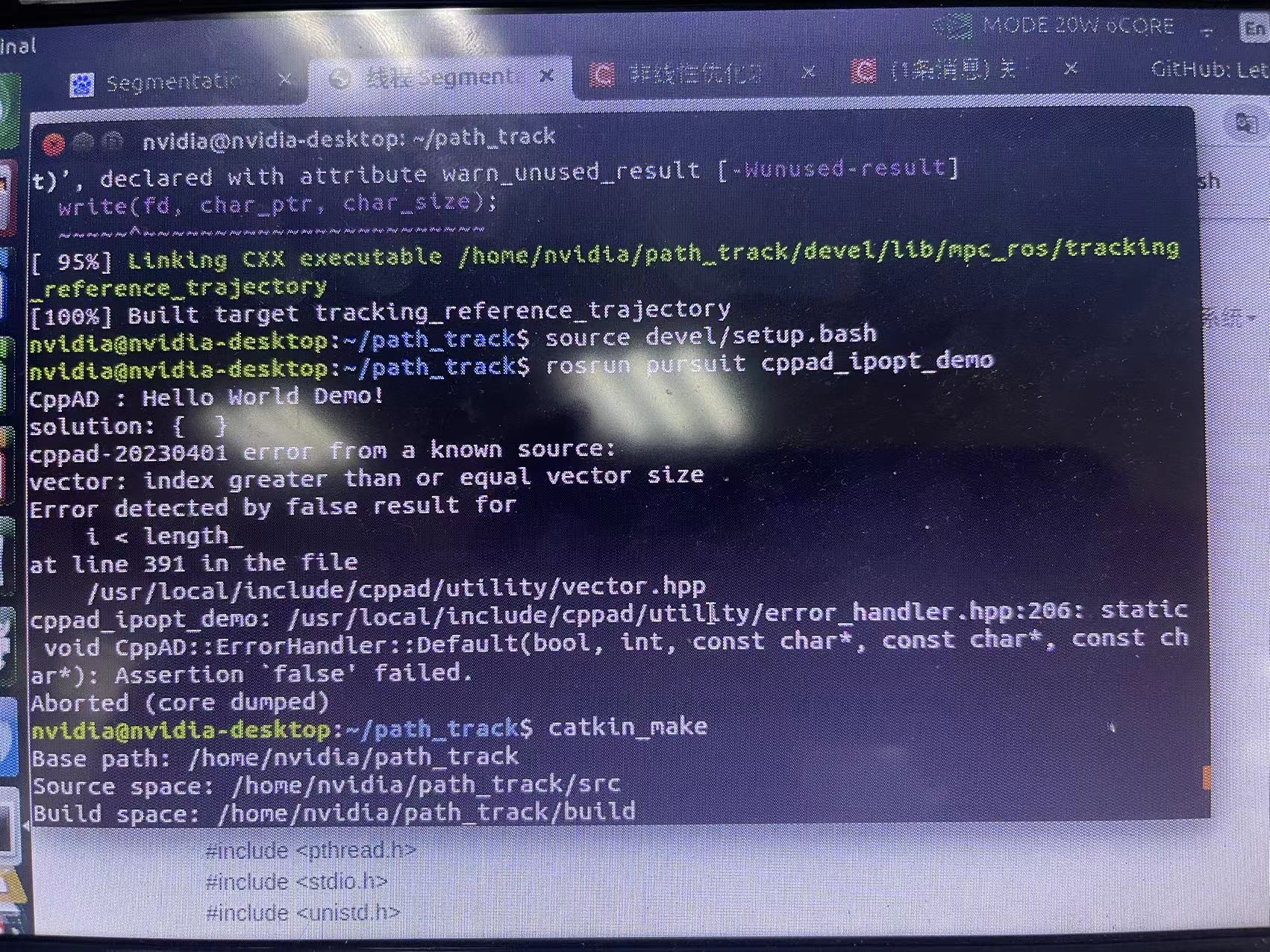
1 year ago The error message is
error from a known source:
vector: index greater than or equal vector size
...The best way to debug this is the build a debugging version of your program, run in the debugger, and when the error occurs, go up the stack to find the vector that is smaller than the requested index.
Please try this and report back what you find out.
 zrd1234
zrd1234 When I change it to 5, I don't get an error, but I get some problems.
When I change it to 5, I don't get an error, but I get some problems.
When I do the cppad and ipopt joint solution, I run into some problems. The code is as follows.
include
include <cppad/ipopt/solve.hpp>
using namespace std;
namespace { using CppAD::AD; class FG_eval { public: typedef CPPAD_TESTVECTOR(AD) ADvector;
void operator()(ADvector& fg, const ADvector& x)
{
assert(fg.size() == 3);
assert(x.size() == 4);
// variables
AD x1 = x[0];
AD x2 = x[1];
AD x3 = x[2];
AD x4 = x[3];
// f(x) objective function
fg[0] = x1 x4 (x1 + x2 + x3) + x3;
// constraints
fg[1] = x1 x2 x3 x4;
fg[2] = x1 x1 + x2 x2 + x3 x3 + x4 * x4;
return;
}
};
}
bool get_started(void) { bool ok = true; size_t i; typedef CPPAD_TESTVECTOR(double) Dvector;
}
int main() { cout << "CppAD : Hello World Demo!" << endl; get_started(); return 0; } The results are as follows: