 yck011522
commented
1 year ago
yck011522
commented
1 year ago Just a small suggestion, it would be good to include a script that is runnable for someone else to debug. For example including all the imports in the beginning and a entry point to the script at the end. Not just the class.
Your lcs_polygon_flat should not have only one point. That is an invalid Polygon and it causes the index out of range.
from compas.data import Data
from compas.geometry import *
import math
class Bay(Data):
"""
A bay is a collection of modules sharing the same torque tube. Note that trackers and bays in TRACE use a
right-handed cartesian coordinate system with +x pointing East, +y pointing North and +z pointing towards
the sky. Industry software such as pvlib and pvsyst use a left-handed coordinate system.
"""
def __init__(
self,
bay_id: str = 'example',
num_modules: int = 0,
azimuth: float = 0.0,
axis_tilt: float = 0.0,
rotation_angle: int = 0,
lcs: Frame = Frame([0, 0, 0], [1, 0, 0], [0, 1, 0]),
lcs_polygon_flat: Polygon = Polygon([[0, 0, 0], [1, 0, 0], [1, 1, 0], [0, 1, 0]])
):
"""
Args:
bay_id: unique identifier for tracker
num_modules: number of pv modules in this bay
azimuth: angle rotated about +z axis in a right-handed cartesian frame of reference
rotation_angle: angle rotated about the torque tube axis (+y local frame of reference)
lcs: local coordinate system frame of reference
lcs_polygon_flat: geometry object representative of the bay with zero degrees of rotation
wcs_polygon_rotated: geometry object representative of the bay with rotation in world coordinate system
"""
# --- save base information ---
super().__init__()
# --- calculations ---
# calculate transformation of world and local coordinate systems
to_wcs = Transformation.from_frame_to_frame(
Frame.worldXY(),
lcs
)
# calculate rotated polygon
rotation_about_y = Rotation.from_axis_and_angle(
[0, 1, 0],
math.radians(rotation_angle)
)
lcs_polygon_rotated = lcs_polygon_flat.transformed(rotation_about_y)
# load
self.bay_id = bay_id
self.num_modules = num_modules
self.azimuth = azimuth
self.axis_tilt = axis_tilt
self.rotation_angle = rotation_angle
self.lcs = lcs
self.lcs_polygon_flat = lcs_polygon_flat
self.wcs_polygon_rotated = lcs_polygon_rotated.transformed(to_wcs)
@property
def data(self):
return {
'bay_id': self.bay_id,
'num_modules': self.num_modules,
'azimuth': self.azimuth,
'axis_tilt': self.axis_tilt,
'rotation_angle': self.rotation_angle,
'lcs': self.lcs,
'lcs_polygon_flat': self.lcs_polygon_flat,
'wcs_polygon_rotated': self.wcs_polygon_rotated
}
@data.setter
def data(self, data):
self.bay_id = data['bay_id']
self.num_modules = data['num_modules']
self.azimuth = data['azimuth']
self.axis_tilt = data['axis_tilt']
self.rotation_angle = data['rotation_angle']
self.lcs = data['lcs']
self.lcs_polygon_flat = data['lcs_polygon_flat']
self.wcs_polygon_rotated = data['wcs_polygon_rotated']
if __name__ == "__main__":
b = Bay()
print(b.data)
# Serialization and Deserialize
b.to_json('test.json', pretty=True)
c = Bay.from_json('test.json')
print(c.data)See if this is what you want. The json looks like this.
"axis_tilt": 0.0,
"azimuth": 0.0,
"bay_id": "example",
"lcs": {
"dtype": "compas.geometry/Frame",
"value": {
"point": [
0.0,
0.0,
0.0
],
"xaxis": [
1.0,
0.0,
0.0
],
"yaxis": [
0.0,
1.0,
0.0
]
}
},
"lcs_polygon_flat": {
"dtype": "compas.geometry/Polygon",
"value": {
"points": [
[
0.0,
0.0,
0.0
],
[
1.0,
0.0,
0.0
],
[
1.0,
1.0,
0.0
],
[
0.0,
1.0,
0.0
]
]
}
},
"num_modules": 0,
"rotation_angle": 0,
"wcs_polygon_rotated": {
"dtype": "compas.geometry/Polygon",
"value": {
"points": [
[
0.0,
0.0,
0.0
],
[
1.0,
0.0,
0.0
],
[
1.0,
1.0,
0.0
],
[
0.0,
1.0,
0.0
]
]
}
}
}print out looks like this
{'bay_id': 'example', 'num_modules': 0, 'azimuth': 0.0, 'axis_tilt': 0.0, 'rotation_angle': 0, 'lcs': Frame(Point(0.000, 0.000, 0.000), Vector(1.000, 0.000, 0.000), Vector(0.000, 1.000, 0.000)), 'lcs_polygon_flat': Polygon([Point(0.000, 0.000, 0.000), Point(1.000, 0.000, 0.000), Point(1.000, 1.000, 0.000), Point(0.000, 1.000, 0.000)]), 'wcs_polygon_rotated': Polygon([Point(0.000, 0.000, 0.000), Point(1.000, 0.000, 0.000), Point(1.000, 1.000, 0.000), Point(0.000, 1.000, 0.000)])}
{'bay_id': 'example', 'num_modules': 0, 'azimuth': 0.0, 'axis_tilt': 0.0, 'rotation_angle': 0, 'lcs': Frame(Point(0.000, 0.000, 0.000), Vector(1.000, 0.000, 0.000), Vector(0.000, 1.000, 0.000)), 'lcs_polygon_flat': Polygon([Point(0.000, 0.000, 0.000), Point(1.000, 0.000, 0.000), Point(1.000, 1.000, 0.000), Point(0.000, 1.000, 0.000)]), 'wcs_polygon_rotated': Polygon([Point(0.000, 0.000, 0.000), Point(1.000, 0.000, 0.000), Point(1.000, 1.000, 0.000), Point(0.000, 1.000, 0.000)])} kurt-rhee
kurt-rhee
Describe the bug I am attempting to create custom classes of objects which are an extension of compas.geometry objects and then serialize them to json. These are basically a geometry object(s) and some meta data about the object. These object serialize to json when I call bay.to_json, but fail to validate and also fail to read from_json.
To Reproduce Steps to reproduce the behavior:
Expected behavior I would expect for the Bay.from_json(file_location) to create a bay object.
Screenshots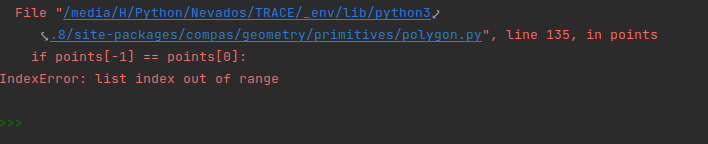
Desktop (please complete the following information):
Additional context Add any other context about the problem here.