 doug-moen
commented
6 years ago
doug-moen
commented
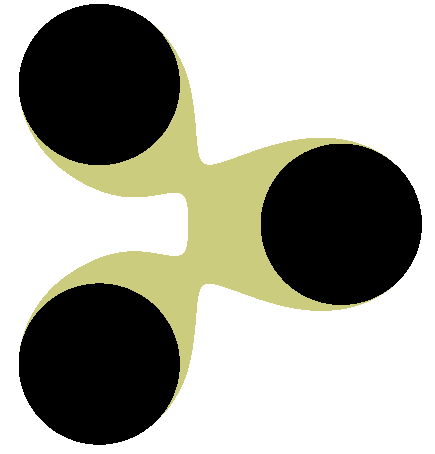
6 years ago If you try to combine 3 shapes using smooth union, the order in which you combine them matters, and the results are not symmetrical, which looks bad. That's the problem I want to solve. I want an n-ary smooth union operation which is commutative and associative: you get the same results regardless of how the shapes are ordered.
Here's what the current situation looks like (smooth union of 3 circles). Try the following program:
let
blend3 n (s1,s2,s3) = smooth n .union (s1, smooth n .union (s2, s3));
circles = [for (a in 0..<tau by tau/3) circle 1 >> move [1,0,0] >> rotate a];
in
union (
blend3 1.27 circles,
union circles >> colour black
)The two circles on the left are blended together first, and then the result is blended with the right circle. Notice that the output is not radially symmetrical.
 bluecube
bluecube

 TLC123
TLC123





 Digital-Monk
Digital-Monk
Can this be solved by recursively smin a list of shapes? I'm thinking Smin_recursive equals smin the lists first element with the Smin_recursive of the lists tail.