 mrocklin
commented
5 years ago
mrocklin
commented
5 years ago My question would be -- what is the state of pytorch support?
It's been as supported as people have made support :) I'm not sure anyone has seen the issue that you've raised here. If you're able to isolate it that would help. I encourage you to find some minimal reproducible example that reproduces the error above. Ideally this looks like the following:
from distributed.protocol import serialize, deserialize
t = # make some pytorch tensor
deserialize(*serialize(t))That works for most pytorch tensors that we've seen so far (see tests in distributed/protocol/torch.py), so presumably your tensors are different in some way. It would be good to find out how.
 muammar
muammar stsievert
stsievert


 Mmiglio
Mmiglio TomAugspurger
TomAugspurger
 sribkain
sribkain GenevieveBuckley
GenevieveBuckley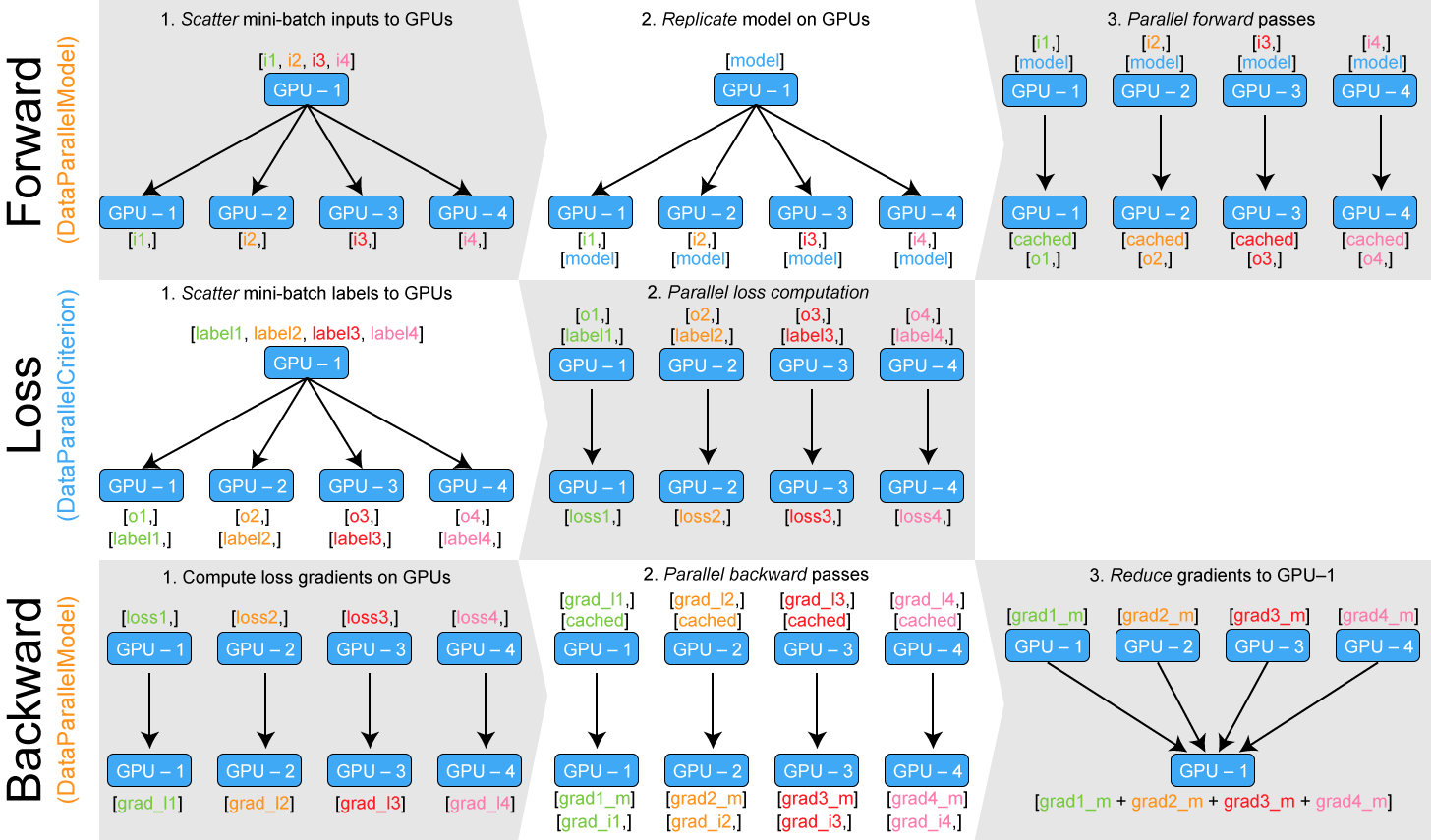{kind=link}
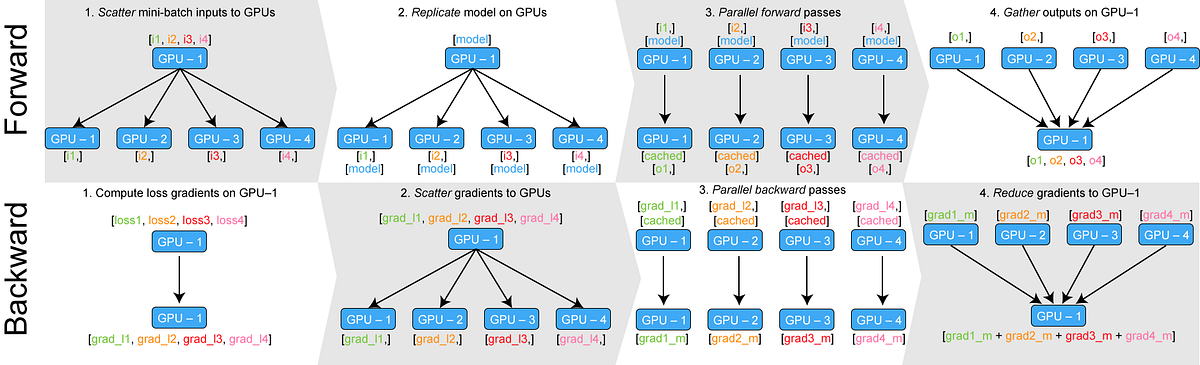
I find Dask very useful, and would like to use it to accelerate some pytorch models I am working on. A function to be accelerated would be the
forward()function. I started doing some tests, but I get errors like these:If I detach the variable, then pytorch does not work with numpy arrays. My question would be -- what is the state of pytorch support? If it is of any help, I would be more than happy to try any code (or even write something if it is under my capabilities) because it would be very useful to have this support in Dask. Thanks for this great python module.