 raffaeler
commented
2 years ago
raffaeler
commented
2 years ago I never had a Jetson in my hands and I am not familiar with it. Are you interested in contributing by creating a "driver" (a class in this repo) for the Jetson family? If you are already using the hardware, it should not be too hard taking the Raspberry PI driver, and adjust the Gpios and peripherals.
 pgrawehr
pgrawehr skywalkerisnull
skywalkerisnull avaki11
avaki11 asheesh1996
asheesh1996 krwq
krwq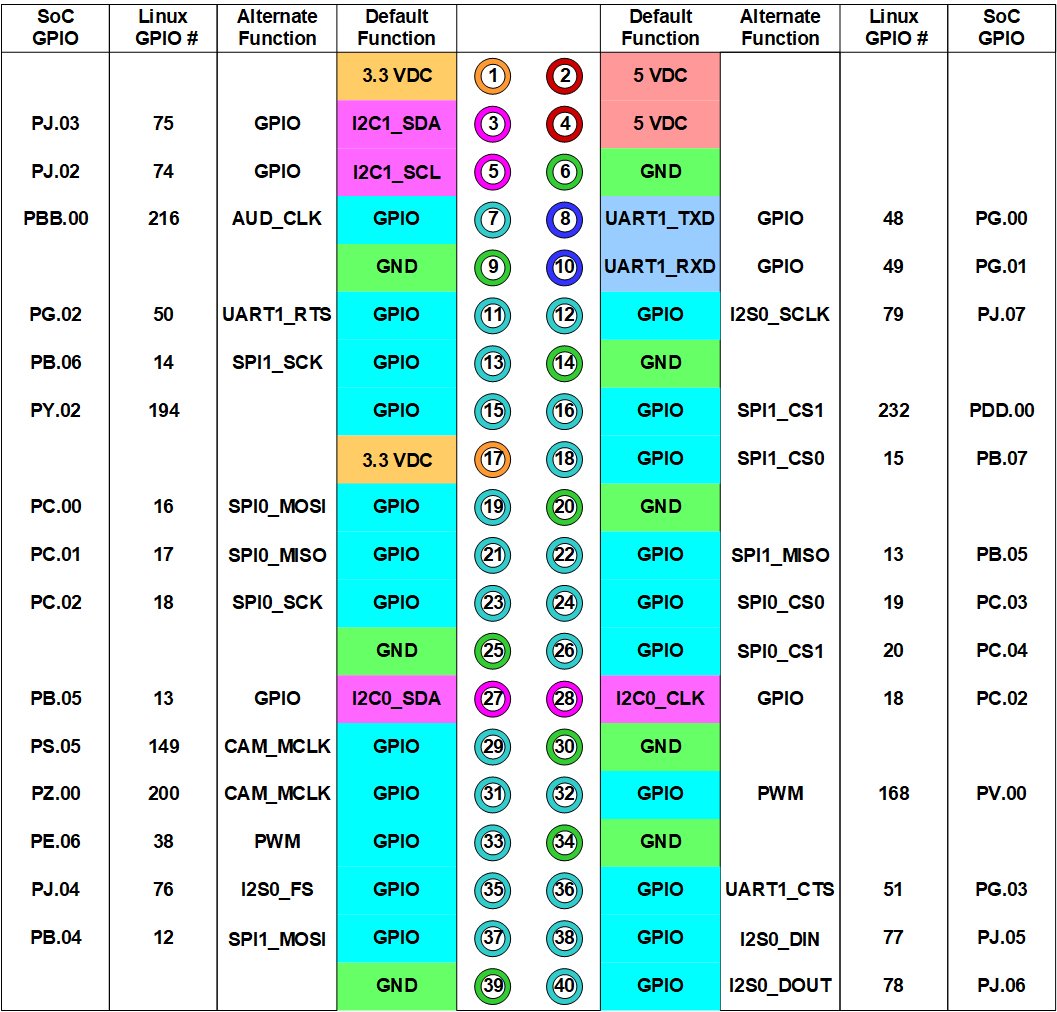{kind=link}
We are developing a number of solutions using the Nvidia Jetson platform: https://developer.nvidia.com/embedded/jetson-modules we have deployed systems from the Nano, through to the AGX and are in the process of designing custom carrier boards for our production versions that will be the NX and the AGX form factors of the Orin series.
One component of our solution has a Blazor Server side service running that will need to interact with the GPIO to control relays, but also gather information from a series of environmental sensors such as temp, humidity, GNSS etc.
I note that on the roadmap, there is a Custom Hardware. The current Jetson Nano has a very similar GPIO pinout to the Raspberry Pi, but it is not quite the same: Jetson Nano 2GB Developer Kit User Guide. A python library already exists that may be possible to use to more easily get the details from.
The following require an account with Nvidia to access:
Jetson Xavier NX: https://developer.nvidia.com/embedded/downloads#?search=Jetson%20Xavier%20NX Jetson Orin NX: https://developer.nvidia.com/embedded/downloads#?search=Jetson%20Orin%20NX Jetson Xavier AGX: https://developer.nvidia.com/embedded/downloads#?search=Jetson%20Xavier%20AGX Jetson Orin AGX: https://developer.nvidia.com/embedded/downloads#?search=Jetson%20AGX%20Orin