Navron4500
commented
1 year ago
Navron4500
commented
1 year ago @irvinmarceloc Do you found any solutions please share?
Closed irvinmarceloc closed 10 months ago
Navron4500
commented
1 year ago @irvinmarceloc Do you found any solutions please share?
Hello everyone, I am trying to connect a jetson nano with pixhawk using dronekit, the fact is that when I use the USB connection the program that I paste below indicates that the vehicle is unarmed when from the Mission Planner it appears that everything is in order, and when I do it by the UART protocol gets the following error.
For me it is something with the dronekit or the code that I am using. Could you help me how to solve this problem. Thanks greetings.
The python code used is the following
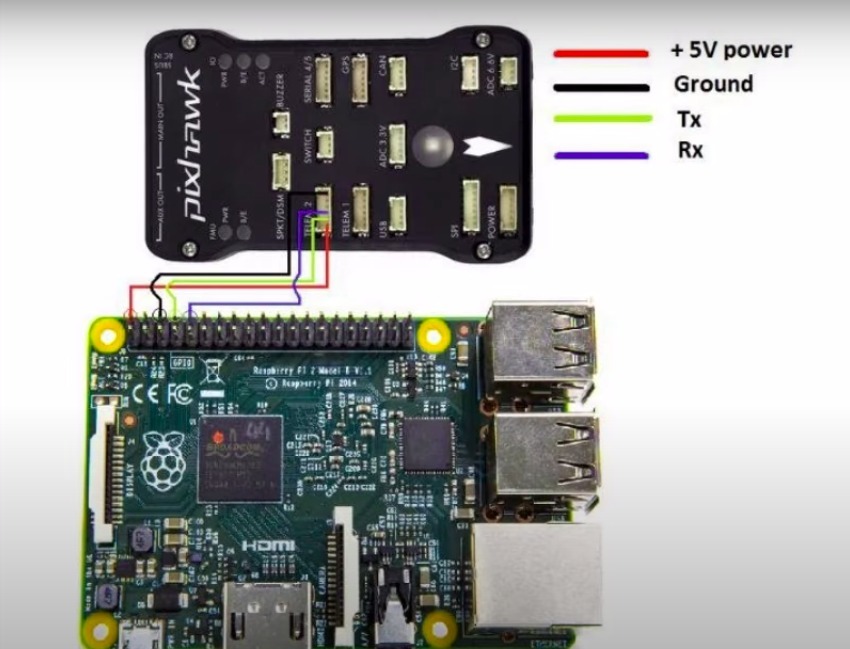
The wiring diagram is this (It's a Jetson nano instead of rasberry)