 dazjd02
commented
6 years ago
dazjd02
commented
6 years ago I am using an interrupt on io34 and having the same issue; I have a 10K resistor pulling it high to try to stabilized it. It seems to show the same behavior whether FALLING or RISING is used. Sometimes interrupt occurs on the falling edge and other times it occurs on the rising edge and switches back every few seconds.
 usmanshahid001
usmanshahid001 yashaelfaith
yashaelfaith musskopf
musskopf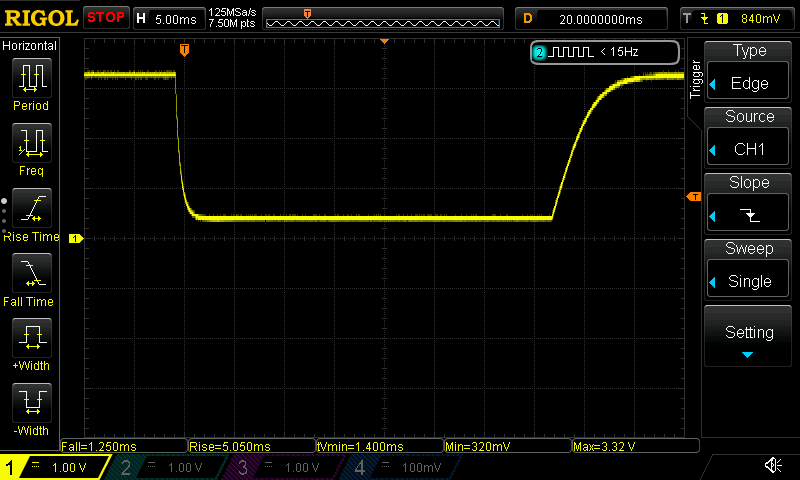
 william-ferguson-au
william-ferguson-au stickbreaker
stickbreaker PepeTheFroggie
PepeTheFroggie bradley-douglas
bradley-douglas rafaelalvesferreira
rafaelalvesferreira stale[bot]
stale[bot] MacLeod-D
MacLeod-D DougArmstrong
DougArmstrong
 JimDrewGH
JimDrewGH BjarneBitscrambler
BjarneBitscrambler gehowi
gehowi zfields
zfields ALEBORTOT
ALEBORTOT LMBernardo
LMBernardo wanggaoteng
wanggaoteng florentbr
florentbr matei-miron
matei-miron MarcinSzymanek
MarcinSzymanek MikeJohnsEng
MikeJohnsEng uygurrr
uygurrr
Hiii i am using proximity sensor with esp32 and it is calling ISR routine on both Falling and Rising Edge i have verified it using nodemcu which is working properly i have tried all things like Falling Rising Change HIGH but its showing the same behaviour kindly help me in this regard...