 fcolas
commented
5 years ago
fcolas
commented
5 years ago That's a new issue for me. Does it happen consistently or just sometimes (and if so, in which condition)? I assume you checked it was not a CPU performance issue and only run the mtnode to reduce outside influences. Is it the same system with two different installs or are there differences in the CPU/USB bus?
 MichalNowicki
MichalNowicki zhouzhiqian
zhouzhiqian artemiialessandrini
artemiialessandrini
When I use MTI300 on Ubunty 16.04 + ROS kinetic, the intervals between every two topics don't keep 5ms (its frequency is 200 Hz).
Just like this figure:
But when I use it on Ubunty 14.04 + ROS indigo, it shows a totally different result.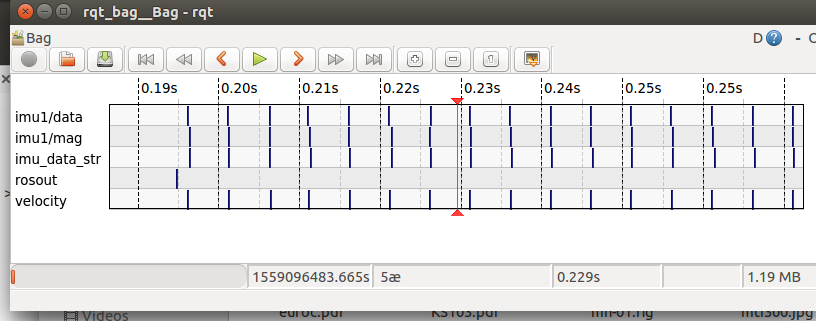
)