fra589
commented
4 years ago
fra589
commented
4 years ago Hi @oilytin,
Since your hardware configuration doesn't have Z axis, the standard CNC axis for this configuration is XY and UV cf. this documentation about standard axis definition:
A foam-cutting machine may have XYUV axes..
The axis definitions in thn RC groups thread is wrong, due to the the constraint of the original axis name definition in the Letartare version, and due to the fact that the author of the machine did not have the courage to rename them. This constraint is not present in grbl-Mega-5X as each axis can have his name defined in the config.h file. So, I considere than you should use the standard definition of axis for your need : X, Y and U,V.
So, you need to add the code for the COREUV mode...
First, define a new compilation option "COREUV" in the config.h file like the "COREXY" one after having defined the axis numbers and name:
(...)
#define N_AXIS 4 // Number of axes
#define N_AXIS_LINEAR 4 // Number of linears axis
(...)
#define AXIS_1_NAME 'X' // Axis names must be in X, Y, Z, A, B, C, U, V & W.
(...)
#define AXIS_2_NAME 'Y'
(...)
#define AXIS_3_NAME 'U'
(...)
#define AXIS_4_NAME 'V'
(...)
#define COREXY
#define COREUV
(...)In nuts_bolds.h, define the COREUV motors like this:
(...)
#ifdef COREXY
#define A_MOTOR AXIS_1 // Must be AXIS_1 (X)
#define B_MOTOR AXIS_2 // Must be AXIS_2 (Y)
#endif
#ifdef COREUV
#define C_MOTOR AXIS_3 // Must be AXIS_3 (U)
#define D_MOTOR AXIS_4 // Must be AXIS_4 (V)
#endif
(...)Then, search for all usages of the COREXY option in all files to duplicate the considered code and adapt it. You will find it in those files: limits.c, planner.c, report.c, system.c and system.h.
It shouldn't be too complicated to do.
Good luck, @++; Gauthier.
 oilytin
oilytin JPGDubois
JPGDubois
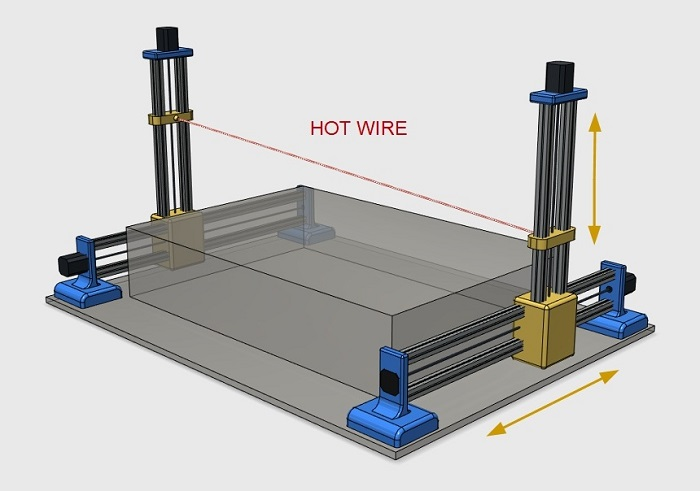
would it be possible to add coreXY kinematics on two sets of axis XY and UZ? I've gone and built a 4 axis hotwire using 2 coreXY mechanisms before realising the limitations of the firmware available. I have started looking at the code and fumbling my way through it. would you be able to give me your opinion(and any advice). I have only picked XYUZ as the gcode sender i was thinking of using seems to be stuck with these definitions RC groups thread. A 4 axis hotwire is generally arranged as per the image below. For my applications the axes would need to move independently in order to create tapered parts.