 fritzo
commented
8 years ago
fritzo
commented
8 years ago Hi furun, I believe (0,0,0) point is the point at infinity, not the point in the center. Jenn3D maps the 3-sphere S^3 onto euclidean space + a point at infinity (which is not drawn). The stereo_project function indeed fails at the singularity at (0,0,0), but this is unavoidable.
The purpose of noise in Animate::Animate is purely aesthetic: it is easier for human eyes to see depth in 3D structure if there is even just a little motion noise.
 furun
furun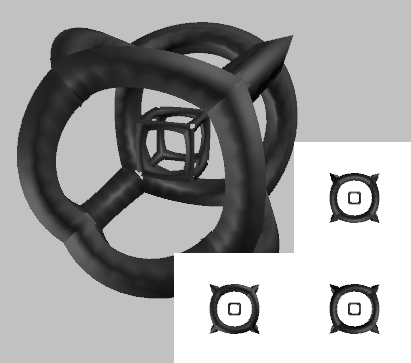
 Back to start
Back to start
 Start
Start
I ask just for curiosity. Is there a clean mathematical way to solve the following problem?
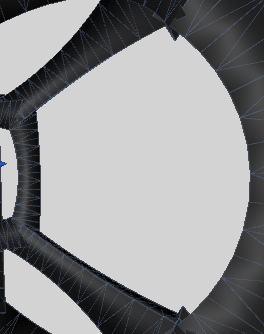
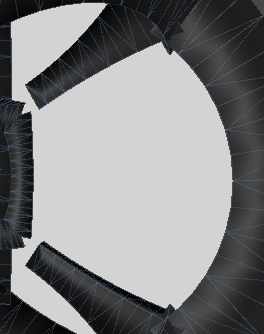
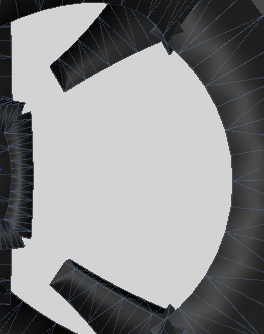
There is a Mathematical weakness if a edge line points directly in the center. So if the two points of a edge are in a straight line to the center (0,0,0).
I speculate, it is the reason for the noise used in Animate::Animate(), to prevent that edge lines point directly in to the center.
For example: In this code part the resolut for n b is infinite/NaN, because r3_norm(N) and r3_norm(B) result is 0, if the edge line points to center.
Or the Edge tube of such edges gets wobbly because it misses the adjustment.